

Compact variable-stiffness tandem elastic actuated joint
A series of elastic and compact technology, applied in the mechanical field, can solve the problems of unrealized variable stiffness and low linearity of the elastic body stiffness curve, and achieve the effects of compact structure, reduced errors, and convenient and accurate use.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
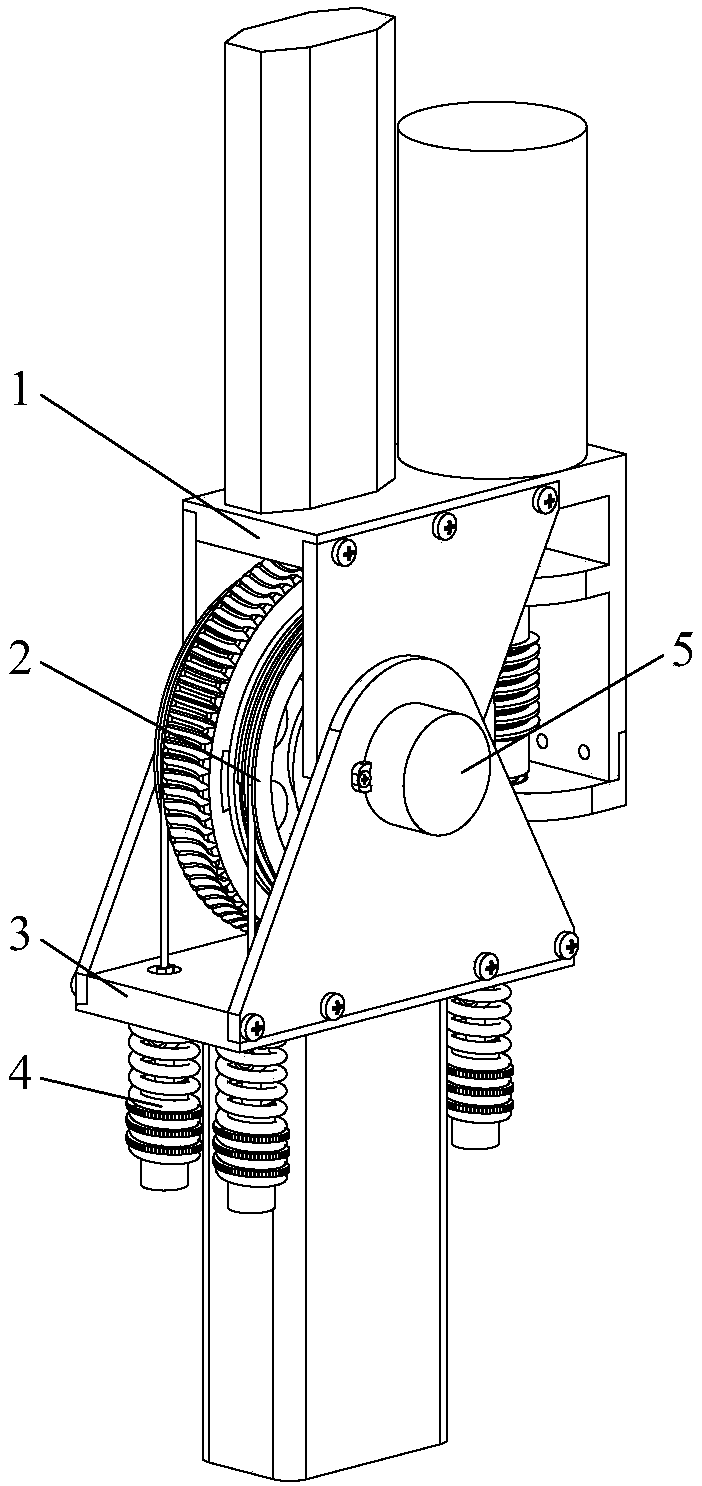
[0028] Such as figure 1 Shown is a schematic diagram of the overall structure of a compact variable stiffness series elastic drive joint according to the present invention. The joint includes a boom part 1 , a drive part 2 , a small arm part 3 , a stiffness adjustment part 4 and an angle sensor 5 .
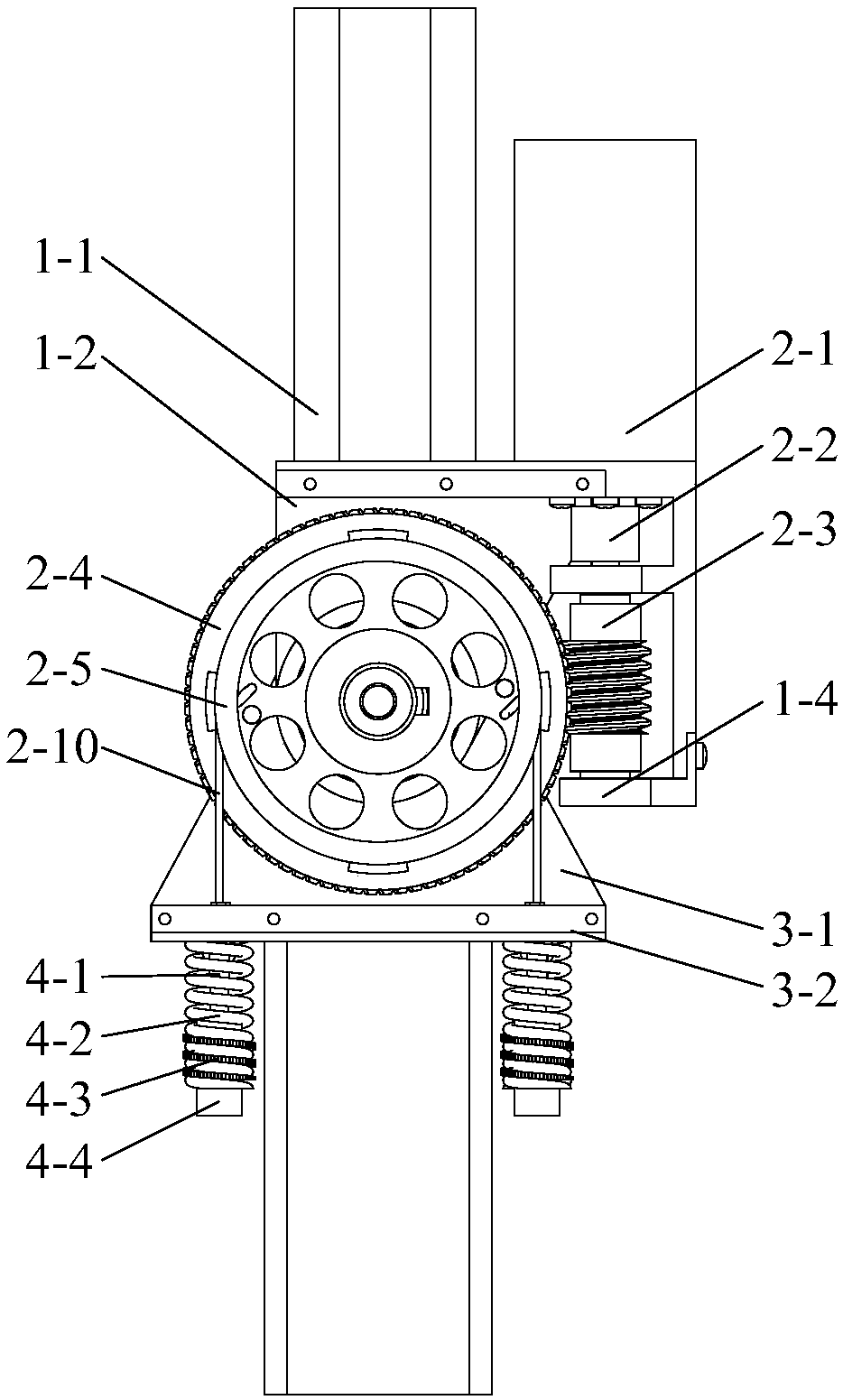
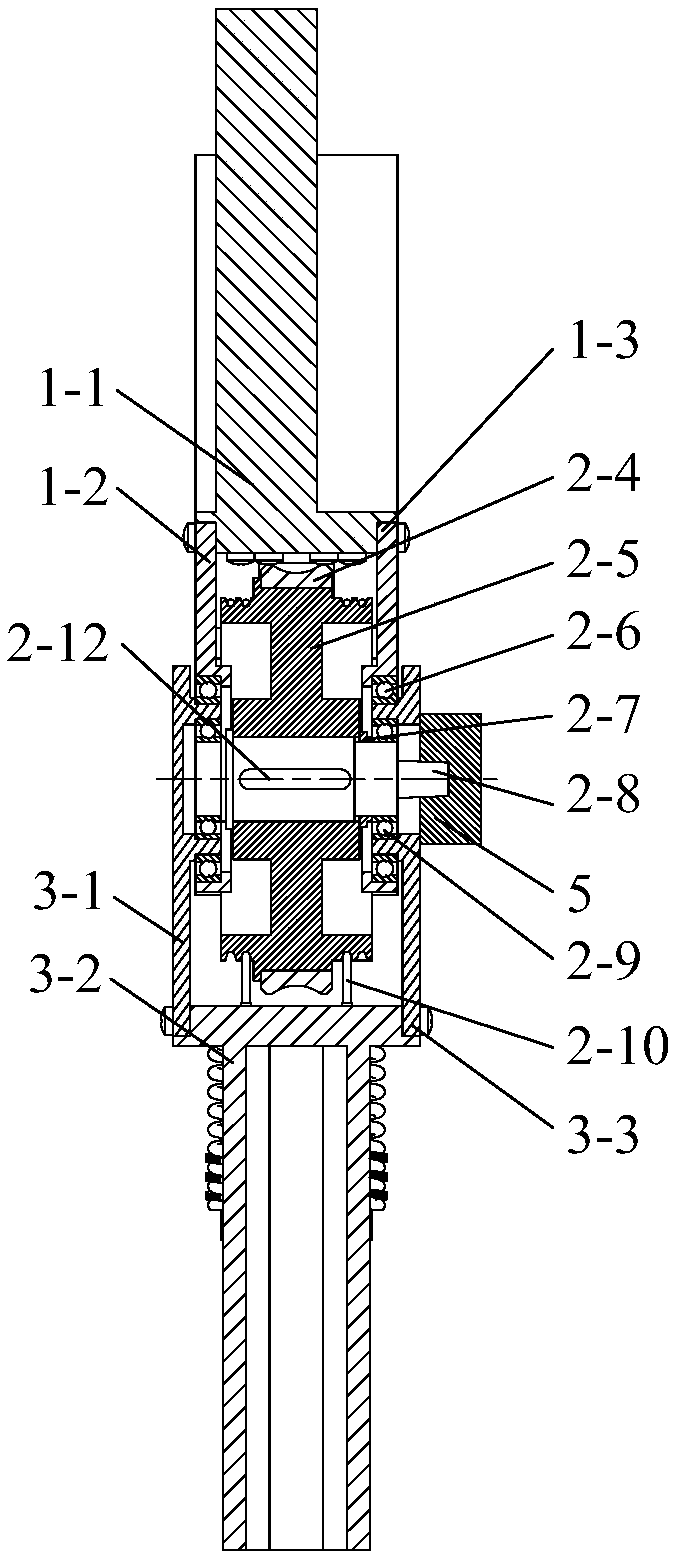
[0029] figure 2 , image 3 Shown is a schematic diagram of the internal structure of a compact variable stiffness series elastic drive joint of the present invention, the boom part 1 includes a boom fixing part 1-1, a boom inner part 1-2, a boom outer part 1-3 and a worm The bearing housing 1-4, the inner part of the boom 1-2 and the outer part of the boom 1-3 are respectively fixed on the inside and outside of the boom fixing part 1-1 by bolts; the worm bearing seat 1-4 is fixed on the boom by bolts Part 1-1 stretches out on the arm, and bearing is i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More