

Target tracking system and tracking method applied to driverless car
An unmanned vehicle and target tracking technology, which is applied in the field of target tracking system based on lossless Kalman filter, can solve the problems of unformed target tracking and information processing system, and achieves strong practicability, strong stability and complete system framework. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The essence of the present invention will be further described below in conjunction with the accompanying drawings and examples, but the content of the present invention is not limited thereto.
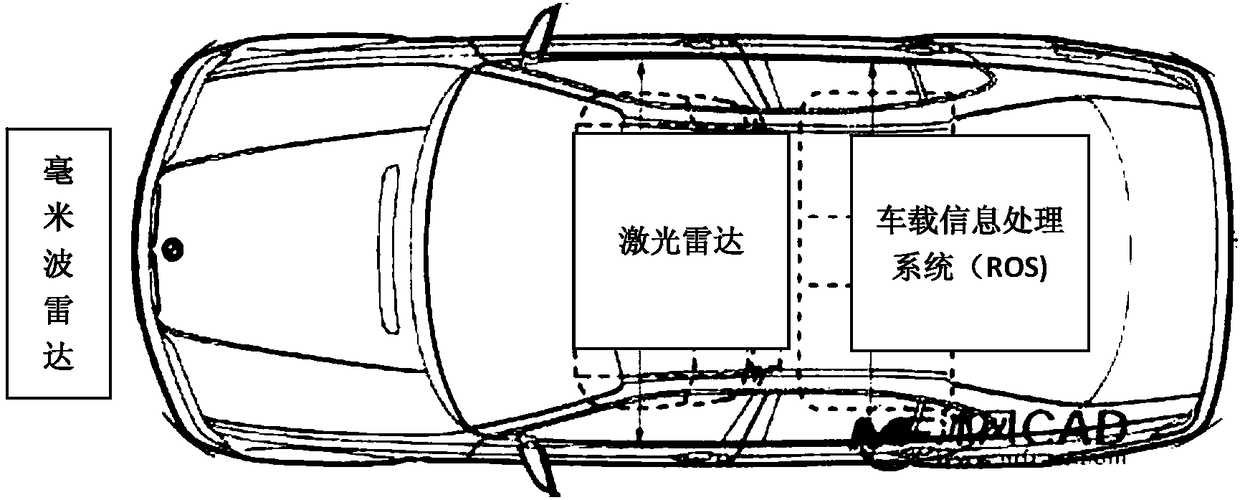
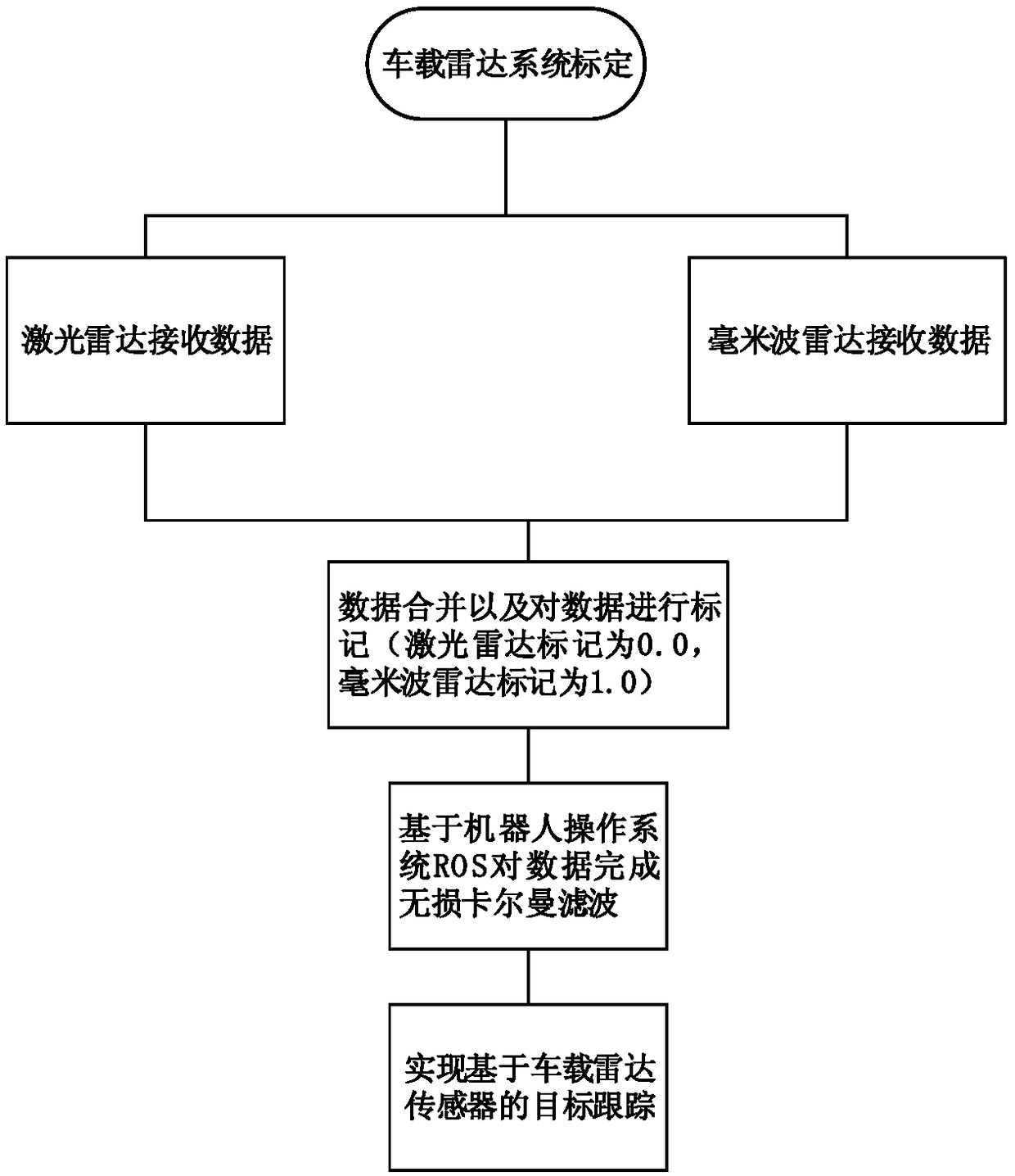
[0039] Such as figure 1 Shown is a system layout diagram of the present invention, the system includes a vehicle-mounted radar system composed of a laser radar and a millimeter-wave radar and a robot operating system Robot Operating System (ROS); the laser radar is installed on the top of the vehicle, and its measurement accuracy is relatively high. However, it is easily affected by environments such as illumination. The millimeter-wave radar is installed at the license plate in front of the vehicle, and its measurement accuracy is relatively low, but it is less affected by the external environment. The combination of the vehicle-mounted radar system can improve the measurement accuracy; There are radar sensor nodes and unscented Kalman filter estimator nodes in the node collec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More