

A flexible pole-climbing robot
A robot and pole-climbing technology, which is applied in the field of automation equipment, can solve problems affecting the application of pole-climbing robots, affect the working efficiency of robots, and affect the flexibility of robots, etc., and achieve the effects of convenient carrying of different equipment, simple structure and stable work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
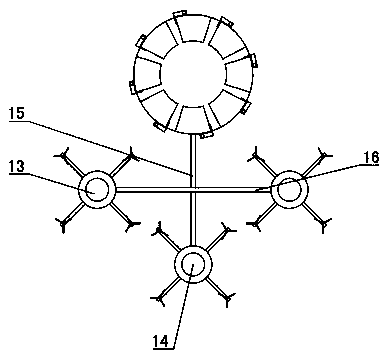
[0044] Such as figure 1 Shown: In this embodiment, there are two lifting drones 13, and the counterweight module is a counterweight drone 14, and the distance between the two lifting drones 13 is greater than the outer diameter of the pole-climbing robot body. A lifting rod 16 is arranged between the two lifting drones 13, and both ends of the lifting rod 16 are fixedly connected to the two lifting drones 13 respectively. A plurality of lifting drones 13 can also be provided, and a plurality of lifting drones 13 are respectively arranged on both sides of the connecting line between the counterweight drone 14 and the main body of the pole-climbing robot. The propeller of the counterweight UAV 14 is arranged downwards, and the counterweight module can also be a counterweight fan, and the air outlet of the counterweight fan is upward.
[0045] A counterweight installation rod 15 is arranged between the main body of the pole climbing robot and the counterweight UAV 14. One end of...
Embodiment 2
[0063] Such as Figure 9 Shown: the difference between embodiment 2 and embodiment 1 is that: the mounting frame 101 of the main body of the pole climbing robot is a box with an inner opening, and the climbing assembly 1 is a triangular ring surrounded by a plurality of mounting frames 101, so that it can Adapt to the pole climbing action of triangular posts or ropes.
Embodiment 3
[0065] Such as Figure 10 As shown: the difference between Embodiment 3 and Embodiment 1 is that the climbing assembly 1 of the main body of the pole-climbing robot is a concave polygonal ring surrounded by a plurality of mounting frames 101, so that it can adapt to a concave polygonal column or Rope climbing action.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More