

Non-contact robot joint torque measuring device based on inverse magnetostrictive effect
A robot joint and inverse magnetostriction technology, which is applied in measurement devices, force/torque/work measuring instruments, torque measurement and other directions, can solve the problems affecting the stability of the device and measurement accuracy, complex structure, and low measurement accuracy, etc. Achieve the effects of high-precision real-time dynamic measurement, simple fixed connection structure, and simple measurement principle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
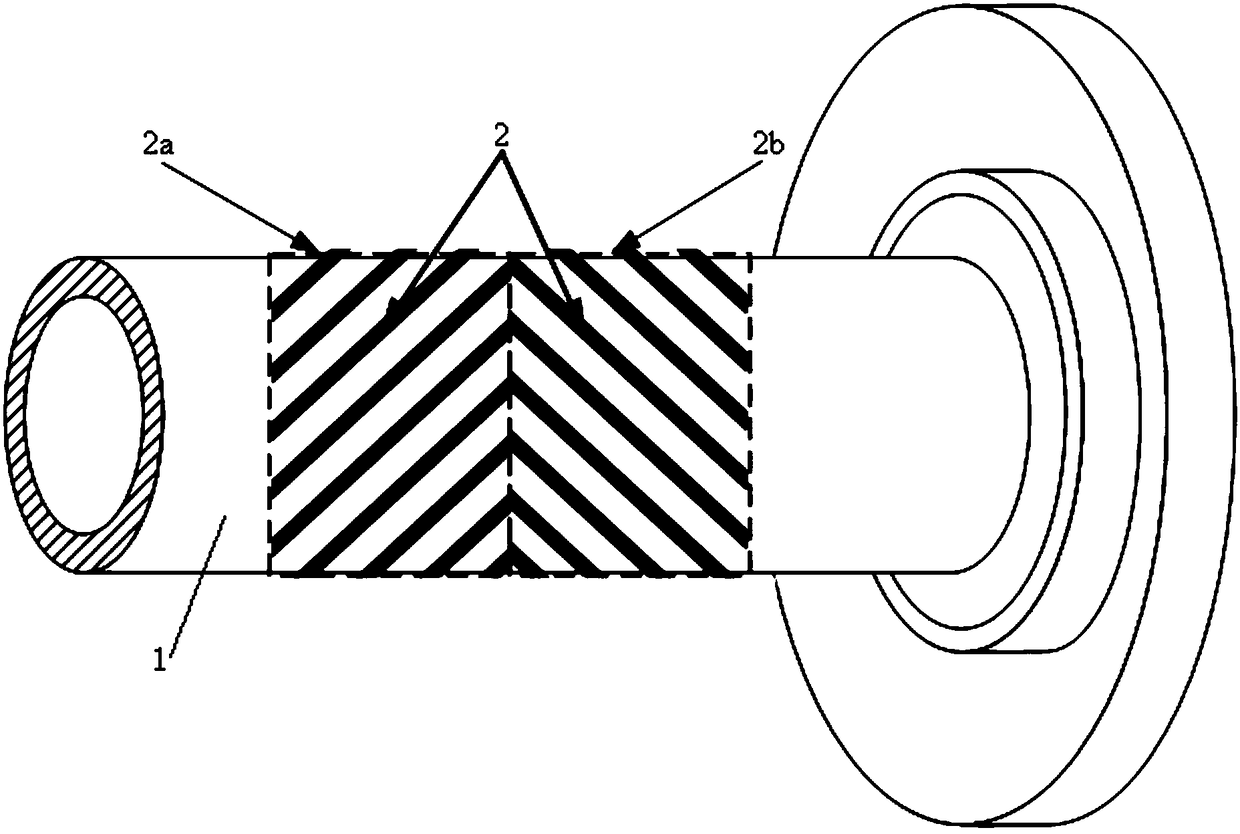
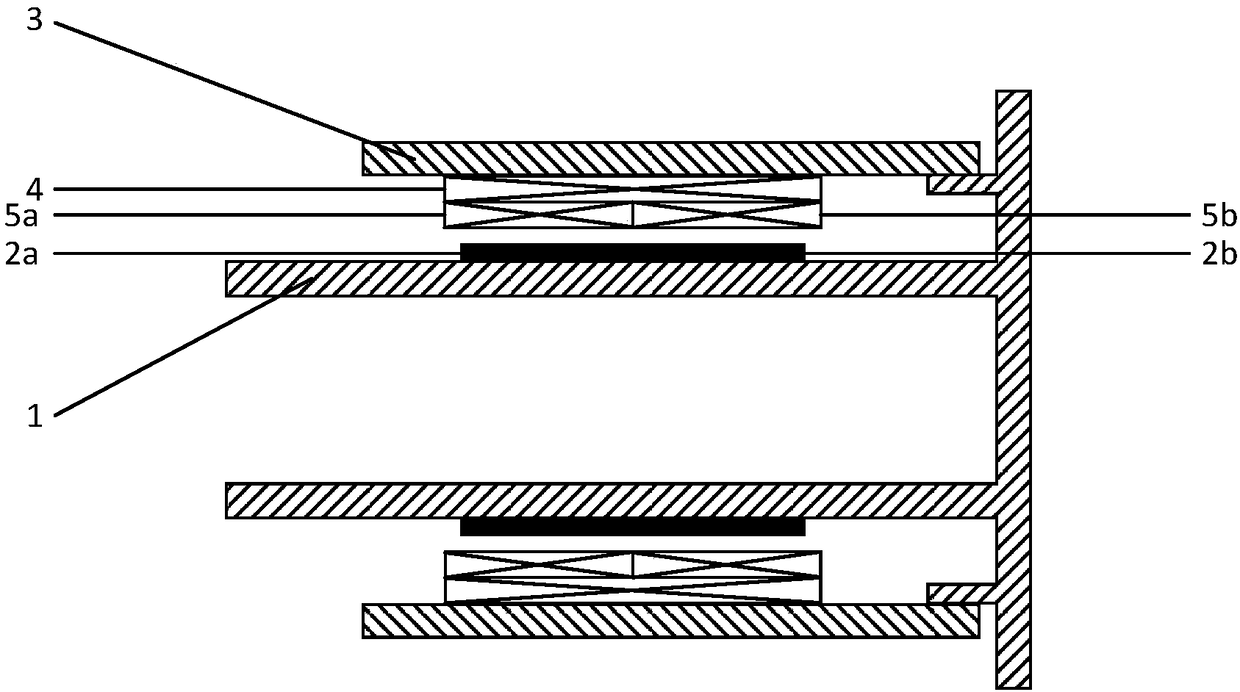
[0036] refer to figure 1 and figure 2 , the non-contact robot joint torque measuring device based on the inverse magnetostrictive effect in the present embodiment, the output shaft 1 of the robot joint torque is coated with a giant magnetostrictive material coating strip 2, and the giant magnetostrictive The stretch material coating strip 2 is divided into a positive giant magnetostrictive material coating strip 2a and a negative giant magnetostrictive material coating strip 2b, and the positive giant magnetostrictive material coating strip 2a and the negative giant magnetostrictive material coating strip 2a The layer strips 2b are coated on the output shaft 1 at equal intervals along the axial left and right symmetry; on the output shaft 1, a sleeve 3 is sleeved on the outer side of the giant magnetostrictive material coating strip 2, and the sleeve 3 An excitation coil 4 is mounted on the inner wall, and a left measurement coil 5a and a right measurement coil 5b of the sam...
Embodiment 2
[0045] refer to figure 1 In this embodiment, on the basis of Embodiment 1, the positive giant magnetostrictive material coating strip 2a is coated on the output shaft 1 with an axial tilt of ﹢ 45°, and the negative giant magnetostrictive material coating strip 2b is applied along the Axially inclined at -45° and applied on output shaft 1.
Embodiment 3
[0047] refer to figure 2 , the lengths of the left measuring coil 5 a and the right measuring coil 5 b along the axis are set equal to 1 / 2 of the length of the excitation coil 4 along the axis.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More