

Underwater salvage equipment combined with unmanned ship for operation and working method thereof
A joint operation and underwater salvage technology, applied in ship salvage, unmanned surface ships, special-purpose ships, etc., can solve problems such as personal property loss, water pollution, and large water pollution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
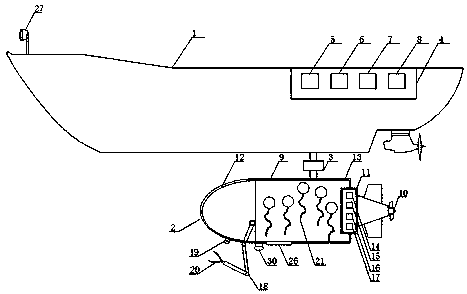
[0045] Such as figure 1 , 2As shown in , 3, an underwater salvage device for joint operation with an unmanned ship, including an unmanned ship 1, a salvage device body 2 and a connecting mechanism 3, the unmanned ship 1 includes a first control mechanism 4, and the first control mechanism 4 Including a first processor 5, a first driving device 6, a first navigation device 7 and a first positioning device 8, the first processor 5 is respectively connected with the first driving device 6, the first navigation device 7 and the first positioning device 8 , the first navigation device 7 is used to generate the first navigation route of the unmanned ship 1, the first driving device 6 is used to drive the unmanned ship 1 to sail, the first positioning is used to obtain the first position information of the unmanned ship 1, and the salvage The device body 2 includes a housing 9 and a screw propulsion mechanism 10, the housing 9 includes a second control mechanism 11, a fishing part 1...
Embodiment 2
[0053] Such as Figure 4 As shown, a working method of an underwater salvage device jointly operated with an unmanned ship includes the following working steps:
[0054] a) The first processor 5 sets a preset area in the first navigation device 7;
[0055] b) The first navigation device 7 automatically generates the first navigation route from the unmanned ship 1 to the preset area and the preset area and sends the first navigation route to the first processor 5;
[0056] c) The first processor 5 outputs a navigation signal to the first driving device 6 according to the first navigation route, and the first driving device 6 drives the unmanned ship 1 to sail according to the first navigation route;
[0057] d) After the unmanned ship 1 arrives at the preset area, the second processor 14 sets the preset water area in the second navigation device 16;
[0058] e) The second navigation device 16 automatically generates the traveling route of the fishing equipment body 2 in the p...
Embodiment 3
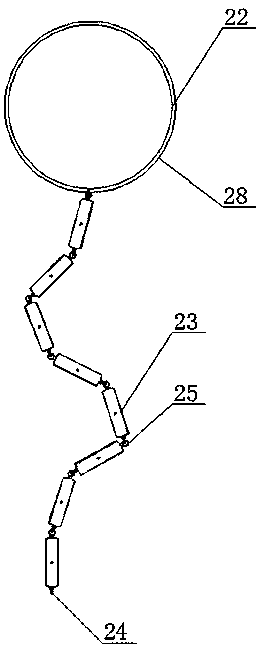
[0074] Such as Figure 7 As shown, after step h also include:
[0075] The high-definition camera 27 shoots the image of the waters around the unmanned ship 1 and sends the image to the first processor 5;
[0076] The first processor 5 judges whether the floating device 21 appears in the image;
[0077] If so, the first processor 5 calculates the position information of the floating device 21 and sends the floating information to the first navigation device 7;
[0078]The first navigation device 7 generates a second navigation route from the unmanned ship 1 to the floating device 21 and sends the second navigation route to the first processor 5;
[0079] The first processor 5 outputs a second navigation signal to the first driving device 6 according to the second navigation route, and the first driving device 6 drives the unmanned ship 1 to sail to the floating device 21;
[0080] The first processor 5 outputs a salvage signal to the first driving device 6 , and the first d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More