

Movement control method of 2D (Two-Dimensional) wheeled robot based on moveable foot wheel
A wheeled robot and robot motion technology, which is applied in non-electric variable control, two-dimensional position/channel control, attitude control, etc. Small size, high assembly efficiency, and the effect of improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
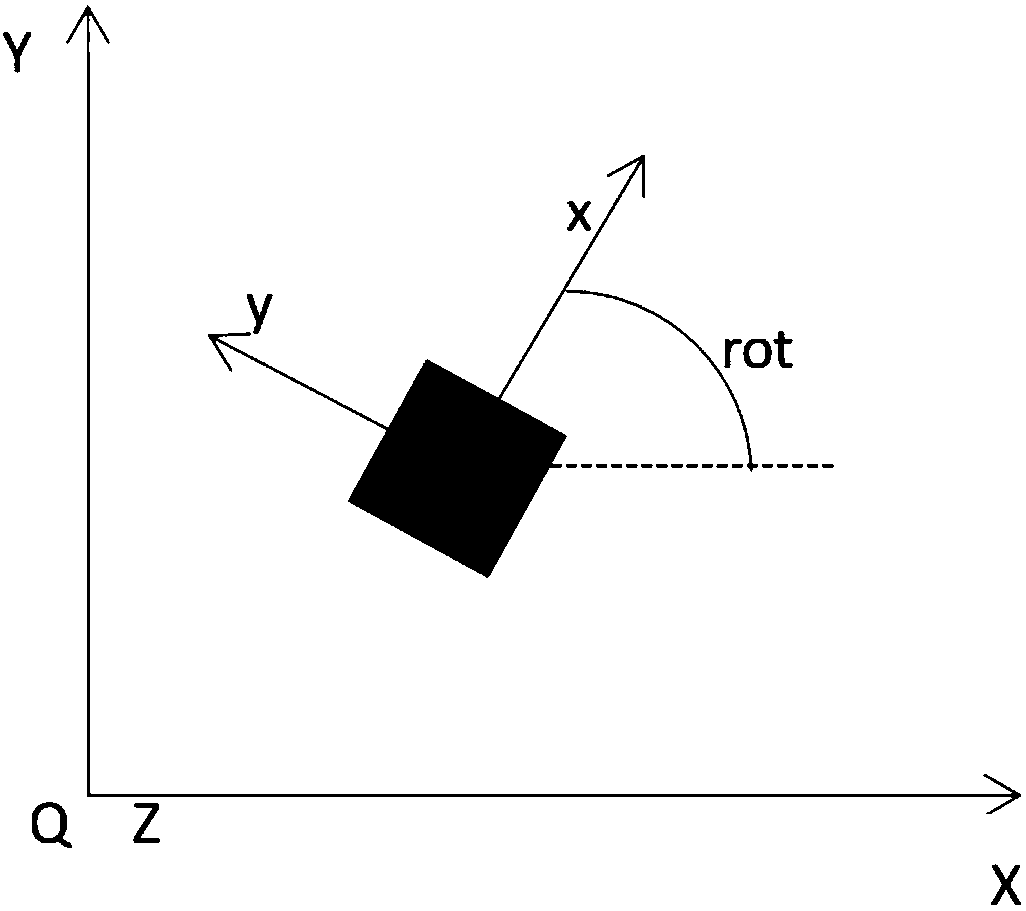
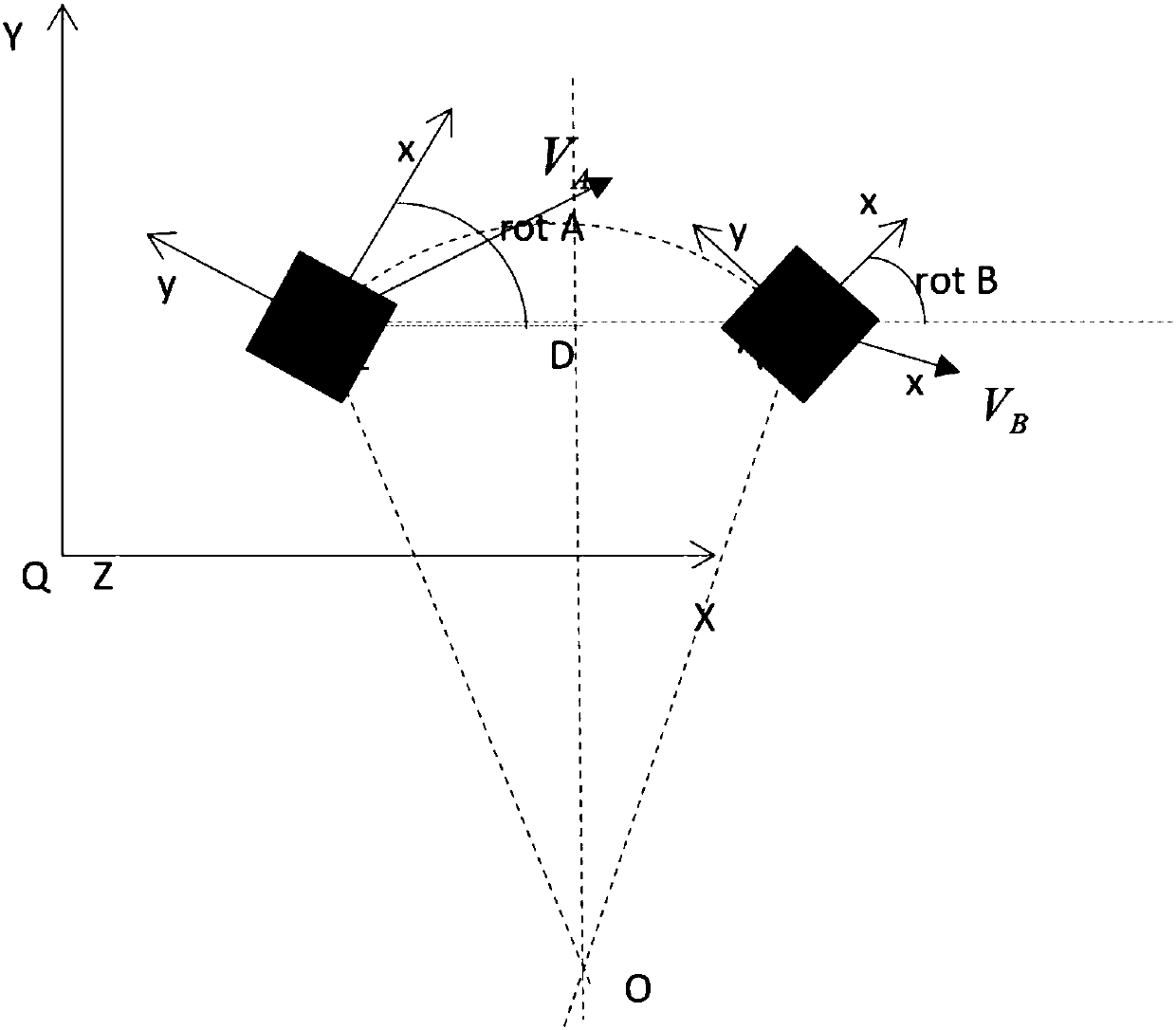
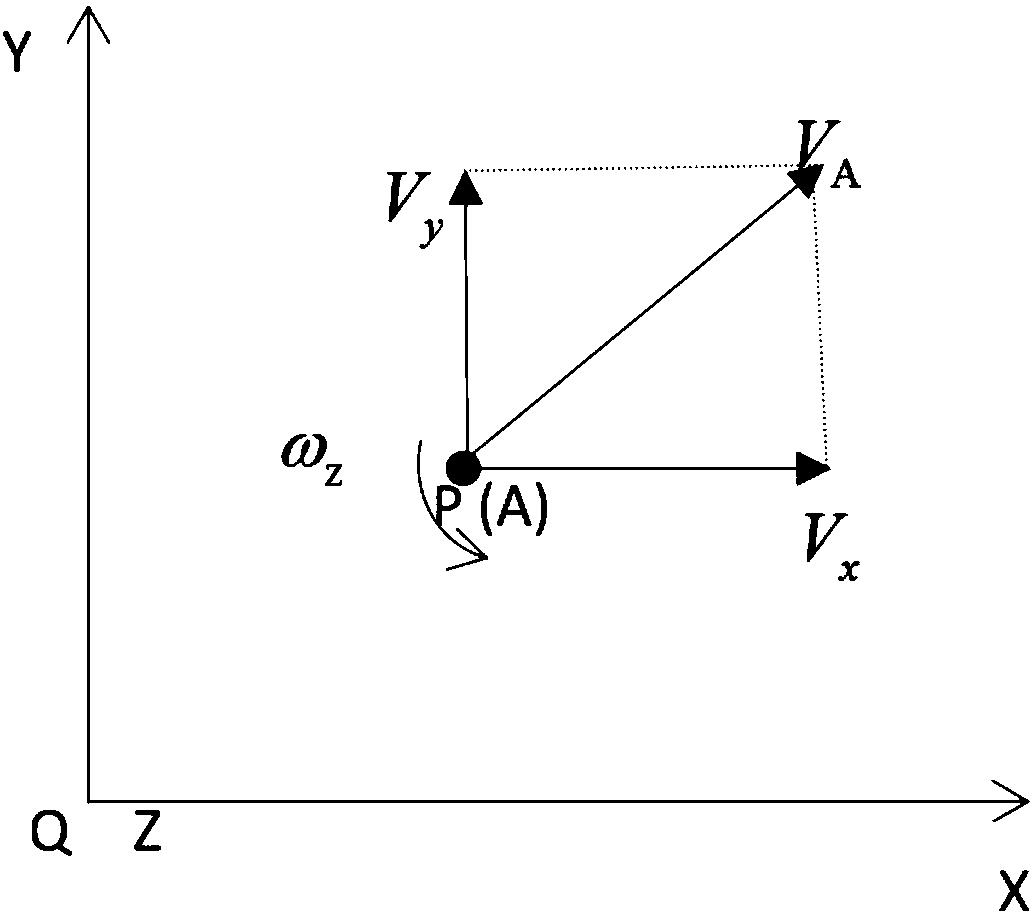
[0034] The present invention proposes a motion control method for a 2D wheeled robot based on movable casters. The movable casters are controllable in two aspects. 360 degree rotation of the axis on which the center of mass lies. The robot can change the rotation speed n of any movable caster at any time i , and the angle ψ between the wheel orientation and the positive direction of the robot on the plane i , 0≤i≤m, the number of movable casters m≥2. This 2D wheeled robot based on movable casters can adopt existing products in the prior art, and the present invention studies the motion control of the device.
[0035] Using the 2D wheeled robot based on movable casters of the present invention can realize but not limited to the following motion patterns:
[0036] (1) The robot moves in a straight line on the plane without...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More