

Automatic obstacle avoidance type tree obstacle clearing aerial robot and obstacle avoidance method
An aerial robot and automatic obstacle avoidance technology, applied in botany equipment and methods, agricultural machinery and implements, special forming/shaping machines, etc., can solve problems such as high safety risks, damage to aerial robots, and damage to power lines of environmental objects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
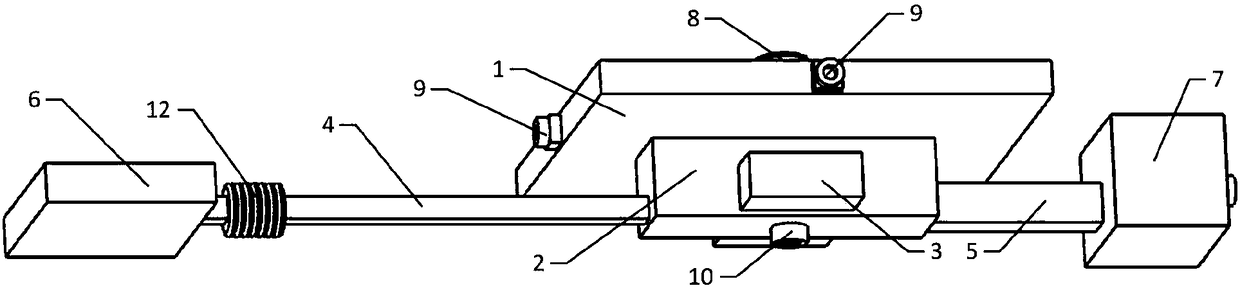
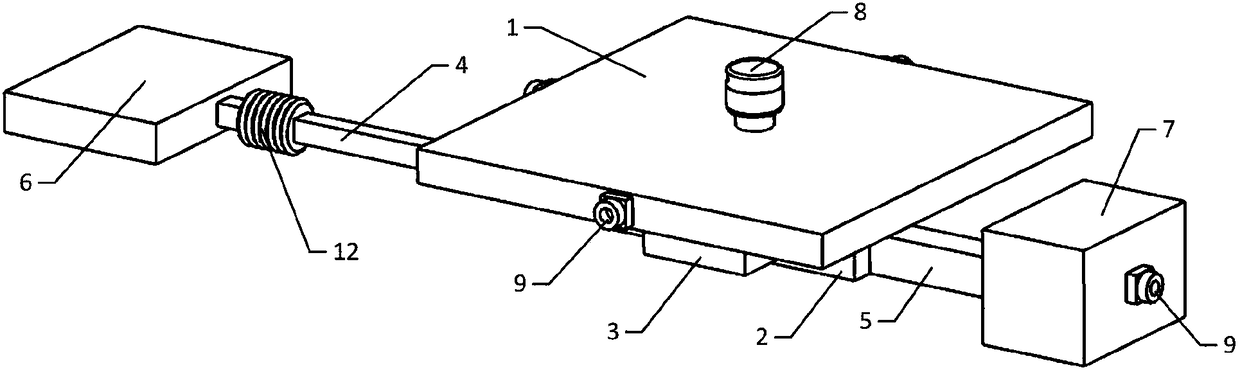
[0059] Embodiment 1: as Figure 1-Figure 4 As shown, a tree obstacle clearing aerial robot for automatic obstacle avoidance includes a multi-rotor platform 1 that provides flight power for the aerial robot, a fuselage 2 fixedly connected directly below the multi-rotor platform 1, and a longitudinal axis mounted on the fuselage 2. The propeller 3, the forearm 4 parallel to the longitudinal axis of the fuselage 2 and fixedly connected to the front end of the fuselage 2, the rear arm 5 parallel to the longitudinal axis of the fuselage 2 and fixedly connected to the rear end of the fuselage 2, the rear arm 5 fixedly connected to the front end of the forearm 4 The tool assembly 6, the battery pack 7 fixedly connected to the rear end of the rear arm 5, the laser radar 8 installed in the upper center of the multi-rotor platform 1, the height-measuring radar 10 arranged at the bottom of the fuselage 2, the front side and both sides of the multi-rotor platform 1 A camera 9 is arranged ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More