

Aerial robot capable of avoiding obstacles automatically, bending vertically and cleaning tree obstacles and obstacle avoidance method
An aerial robot, longitudinal bending technology, applied in the fields of botanical equipment and methods, agricultural machinery and implements, electric pruning saws, etc., can solve problems such as low efficiency, safety accidents, damage to power lines of environmental objects, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
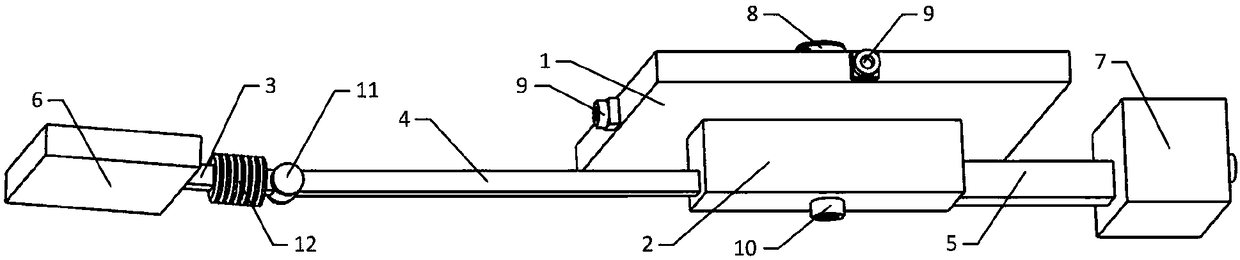
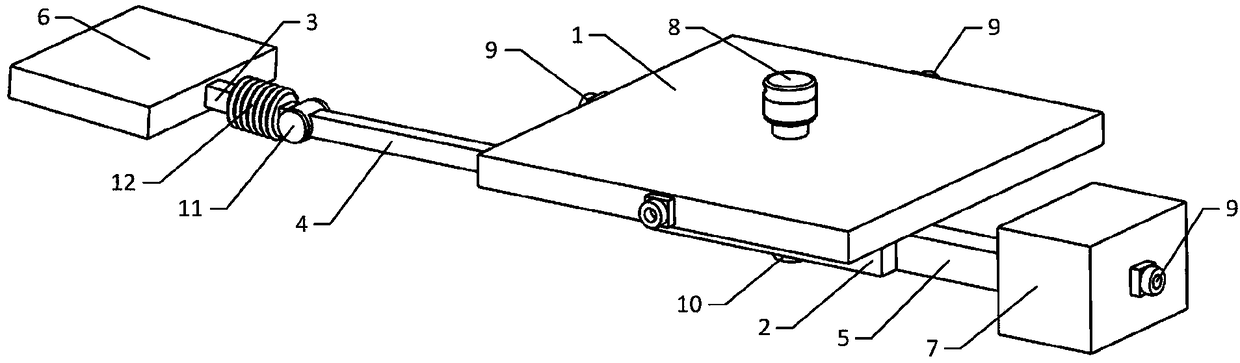
[0060] Embodiment 1: as Figure 1-Figure 4 As shown, a vertically bendable tree obstacle clearing aerial robot for automatic obstacle avoidance includes a multi-rotor platform 1 providing lift for the aerial robot, a fuselage 2 fixedly connected directly below the multi-rotor platform 1, and a longitudinal axis of the fuselage 2. The middle arm 4 parallel to and fixedly connected to the front end of the fuselage 2, the rear arm 5 parallel to the longitudinal axis of the fuselage 2 and fixedly connected to the rear end of the fuselage 2, the forearm connected to the middle arm 4 through the longitudinal bending joint 11 with a built-in drive motor 3. The tool assembly 6 fixedly connected to the front end of the forearm 3, the battery pack 7 fixedly connected to the rear end of the rear arm 5, the laser radar 8 installed in the upper center of the multi-rotor platform 1, and the height measuring radar 10 arranged at the bottom of the fuselage 2, Cameras 9 are arranged on the fro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More