

Steering control method based on vehicle kinematics model under dynamic constraints
A kinematic model and steering control technology, applied in automatic steering control components, steering mechanisms, steering rods, etc., can solve problems such as increased model complexity, improved accuracy, and reduced real-time algorithm performance, achieving fast and reliable operation speed. high sex effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
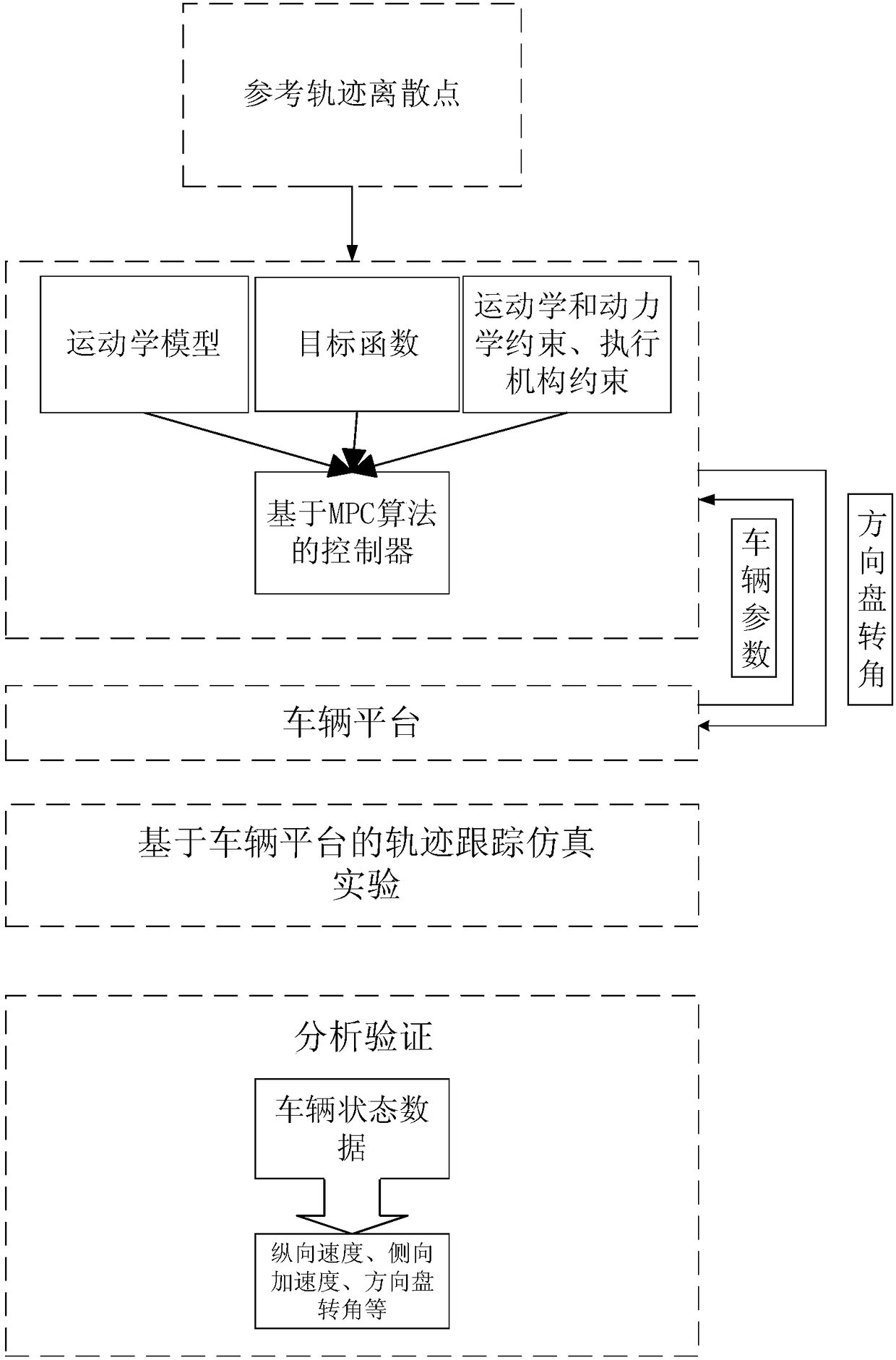
[0046] In the embodiment of the present invention, such as figure 1 As shown, a steering control method based on a vehicle kinematics model under dynamic constraints is provided, including the following steps, step 1, obtaining vehicle structural parameter information and vehicle operating state information, and performing vehicle kinematics modeling,
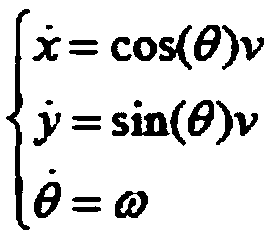
[0047]
[0048] Where: (x, y) is the coordinates of the center of the rear axle of the vehicle, θ is the heading angle of the vehicle, ω is the yaw rate, and v is the longitudinal velocity of the center of the rear axle of the vehicle. Using the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More