

Robot collision detecting system and method, storage medium and operation system
A collision detection and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inability to distinguish the type of collision, insufficient release of collision energy, and inability to adapt to changes in load, etc., to ensure work efficiency, eliminate collision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] Embodiments embodying the features and advantages of the present invention will be described in detail in the following description. It should be understood that the invention can have various changes in different examples without departing from the scope of the invention, and that the descriptions and illustrations therein are illustrative in nature rather than limiting the invention.
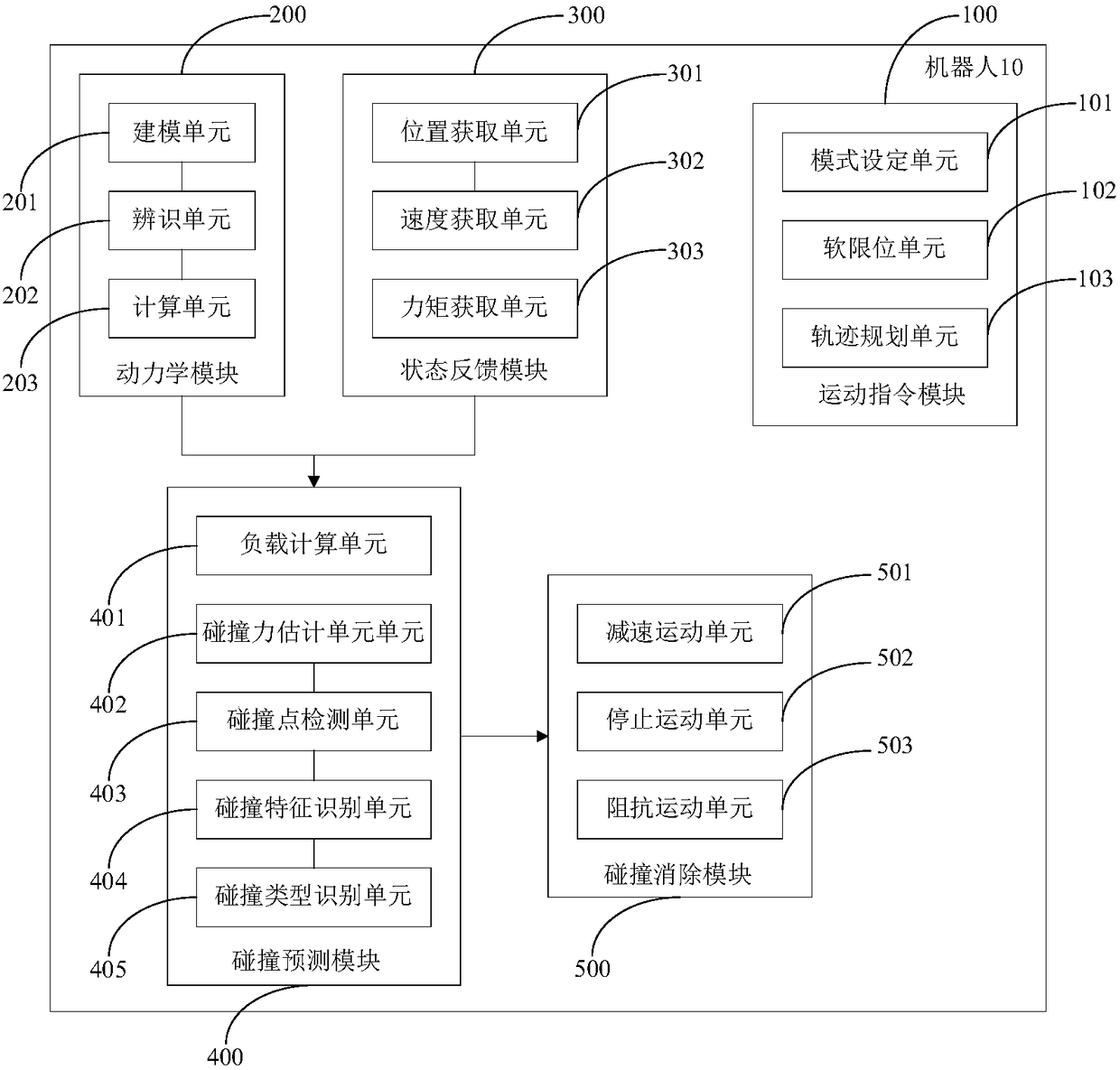
[0071] An embodiment of the present invention provides a robot collision detection system. figure 1 is a schematic structural diagram of a robot collision detection system according to an embodiment of the present invention, as figure 1 As shown, the robot collision detection system is suitable for a robot 10. The robot 10 includes several joints, and a motor is arranged at each joint position. The collision detection system includes: a motion command module 100, which is used to control the motion of the robot; The dynamics module 200, according to the characteristics of the robot, pe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More