

Pipeline inspection robot based on reducing of gear rack
A rack-and-pinion and robot technology, applied in manipulators, special pipes, motor vehicles, etc., can solve problems such as difficult detection of narrow pipes, and achieve the effects of reliable mechanical structure, stable mechanical structure, and accurate transmission motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
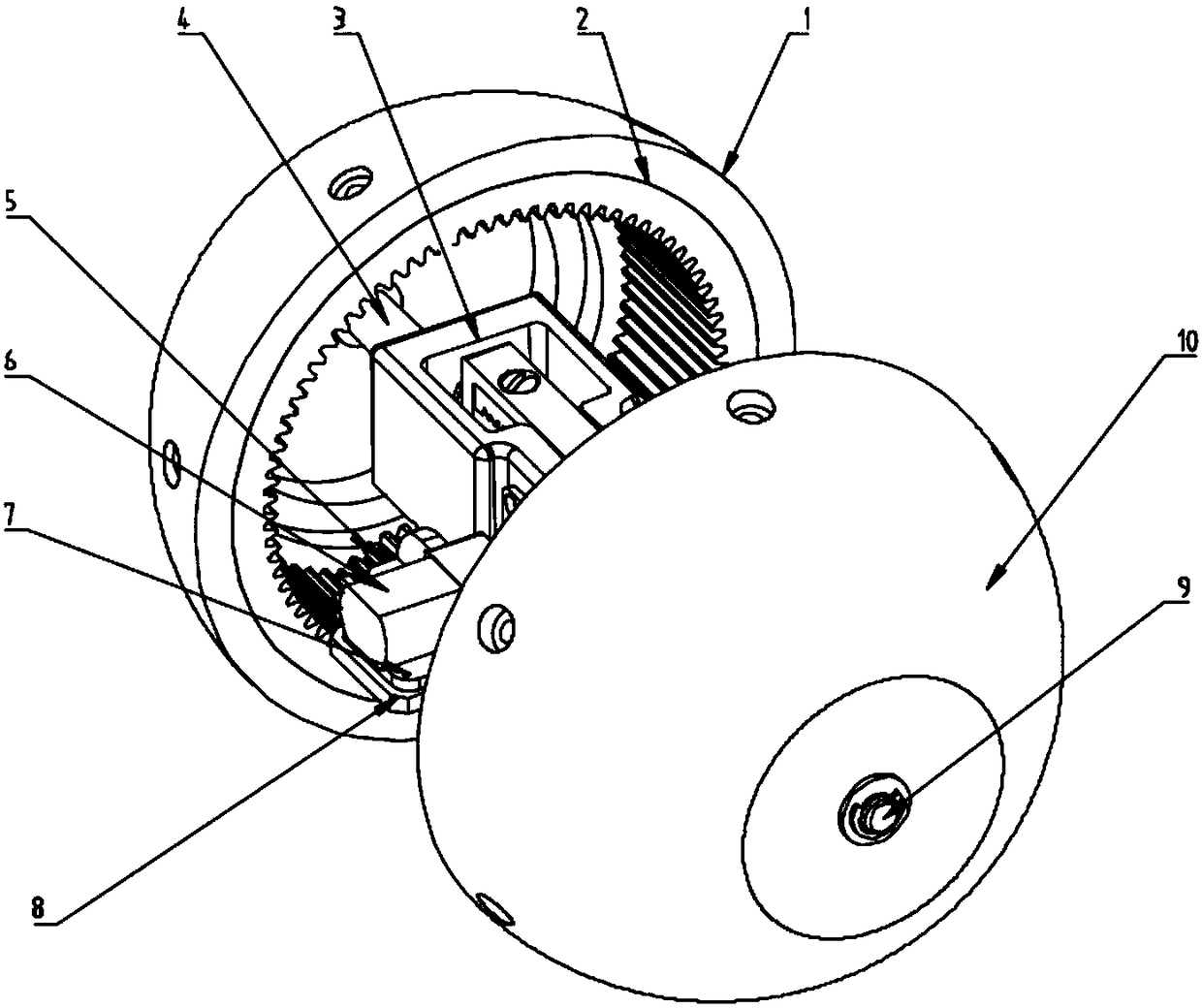
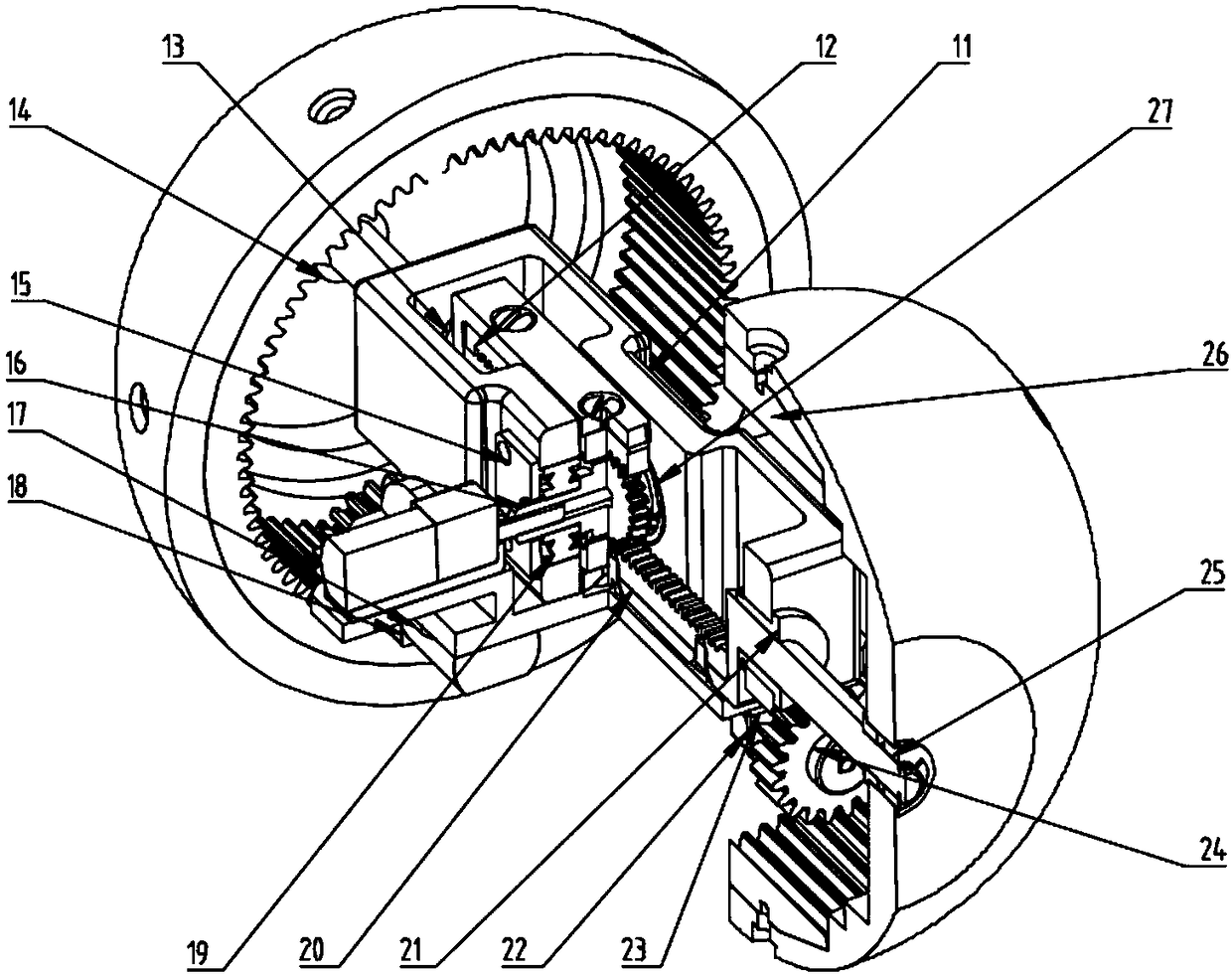
[0039] See attached figure 1 , a pipeline detection robot based on rack and pinion diameter reduction, including: support plate 8, motor bracket I17, rack and pinion gearbox 3, left hemispherical wheel 1, left inner gear 2, right hemispherical wheel 10, right inner gear 26 , motor support II23, motor support III6, pinion I5, pinion II24; the support plate 8 connects the motor support I17, the motor support II23 and the motor support III7 with them through screws, and the rack and pinion reduction box 3 passes through the support plate 8 The screws are fixed together, the left hemispherical wheel 1 and the right hemispherical wheel 10 are respectively connected with the left inner gear 2 and the right inner gear 26 by screws, the motor I18 is fixed with the pinion I5 through the jack screw, and the motor II22 is connected with the pinion I5 through the jack screw. The gear II24 is fixed; driven by the motor I18 and the motor II22, the pinion I5 and the pinion II24 drive the lef...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More