

Unmanned aerial vehicle staged autonomous landing method based on visual information fusion
A visual information, drone technology, applied in non-electric variable control, instruments, control/regulation systems, etc., can solve the problem that the safety of the drone at the end of the boat needs to be improved, the drone is difficult to maintain stability, and the camera is lost. Landmark vision and other issues, to achieve the effect of simplifying computational complexity, lowering technical thresholds, and avoiding lag
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
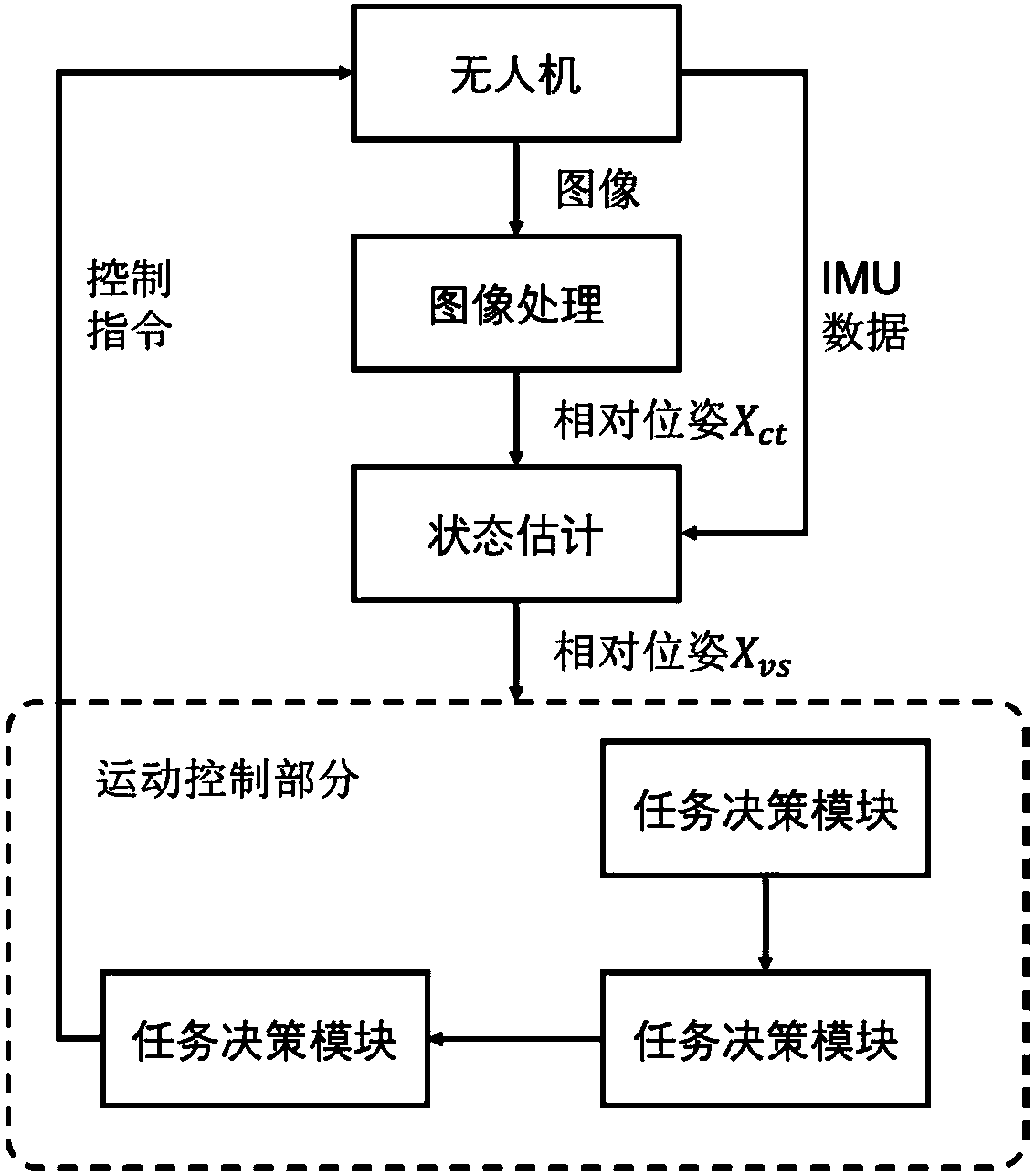
[0063] The following is attached image 3 The technical solution of the present invention is described in detail.
[0064] For the convenience of explanation, the following symbol conventions are first made:
[0065] x ij Refers to the pose of the j reference frame in the i reference frame, where the pose is defined as a 6-dimensional column vector [x y z φθ ψ] T , where (x, y, z) are the position coordinates in the reference system, (φ, θ, ψ) are the angles of rotation around the x-axis, y-axis, and z-axis, respectively, called roll angle, pitch angle, and yaw horn. The reference frames used are: drone reference frame {v}, local reference frame {l}, unmanned boat reference frame {s}, camera reference frame {c}, landmark reference frame {t}. At the same time define some basic symbols of reference frame transformation: if i, j, k represent three reference frames, the symbols Represents the accumulation of transformations, satisfying symbol express The inverse operat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More