

A Method of 3D Target Detection Based on Direction Angle Information
A technology of three-dimensional target and direction angle, which is applied in the field of computer vision and image processing, can solve the problem that the direction angle information is not fully utilized, and achieve the effect of improving accuracy and detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0030] A method for performing three-dimensional target detection based on orientation angle information provided by the present embodiment comprises the following steps:
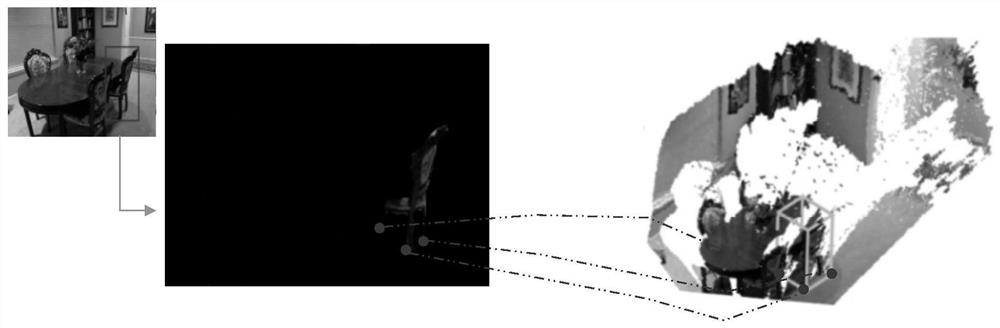
[0031] S1: Perform feature fusion on the color image and depth image collected by the RGB-D camera through Depth-RCNN and classify by support vector machine to obtain a 2.5-dimensional detection frame and a corresponding two-dimensional segmentation instance map;
[0032] S2: Select p on the obtained 2D segmentation instance map 1 , p 2 , p 3 Three points, and according to the three constraints of excluding uncertain points, adding calculation information, and correcting misjudgment points, p is 1 , p 2 , p 3 The information of three points is optimized;
[0033] S3: Calculate the coordinates of the extracted three points in the three-dimensional coordinate system by reconstructing the point cloud from 2D to 3D, determine the direction angle θ according to the coordinates of the three points, and use t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More