

A lunar surface sampling robotic arm
A robotic arm and lunar technology, applied in the field of deep space exploration, can solve the problems of not realizing multi-point sampling, and achieve the effect of less carrying mass, precise and stable grasping, and strong anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below with reference to the accompanying drawings and examples.
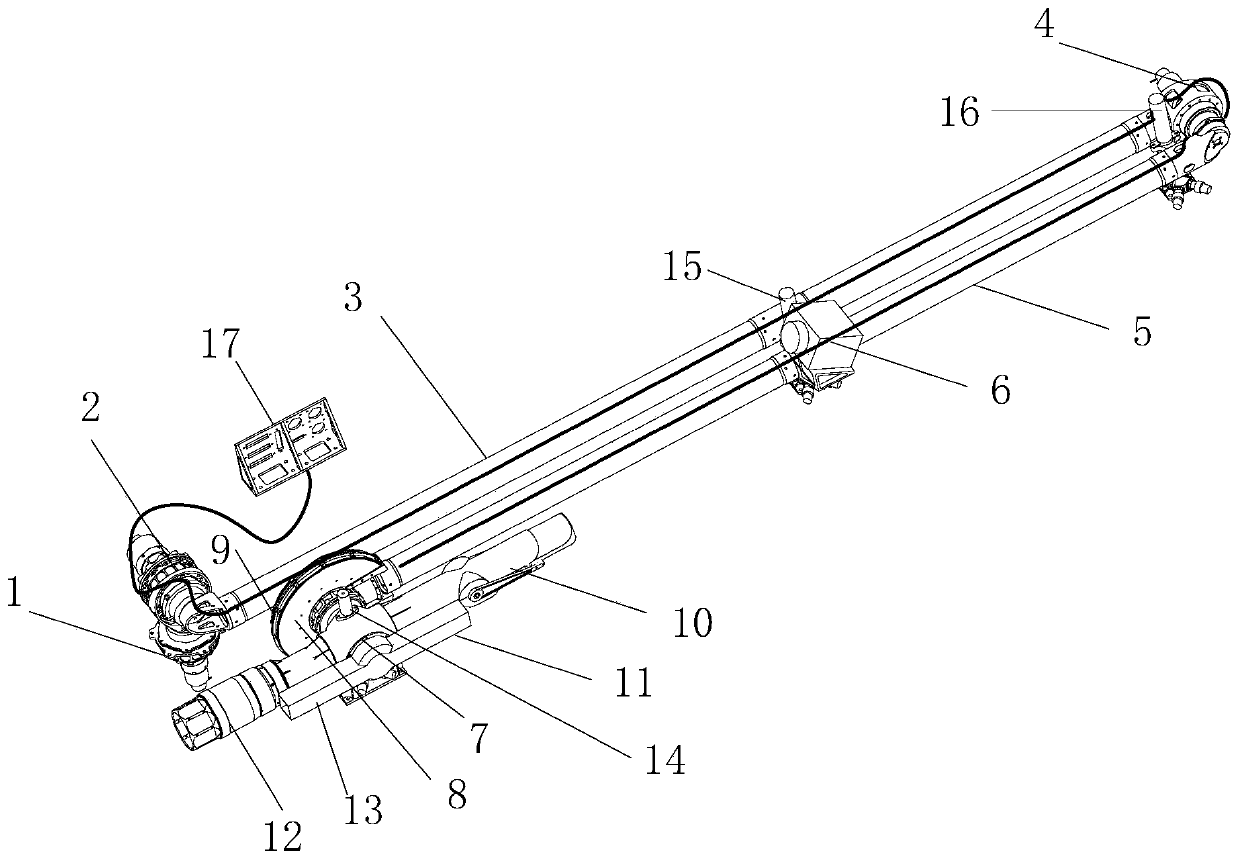
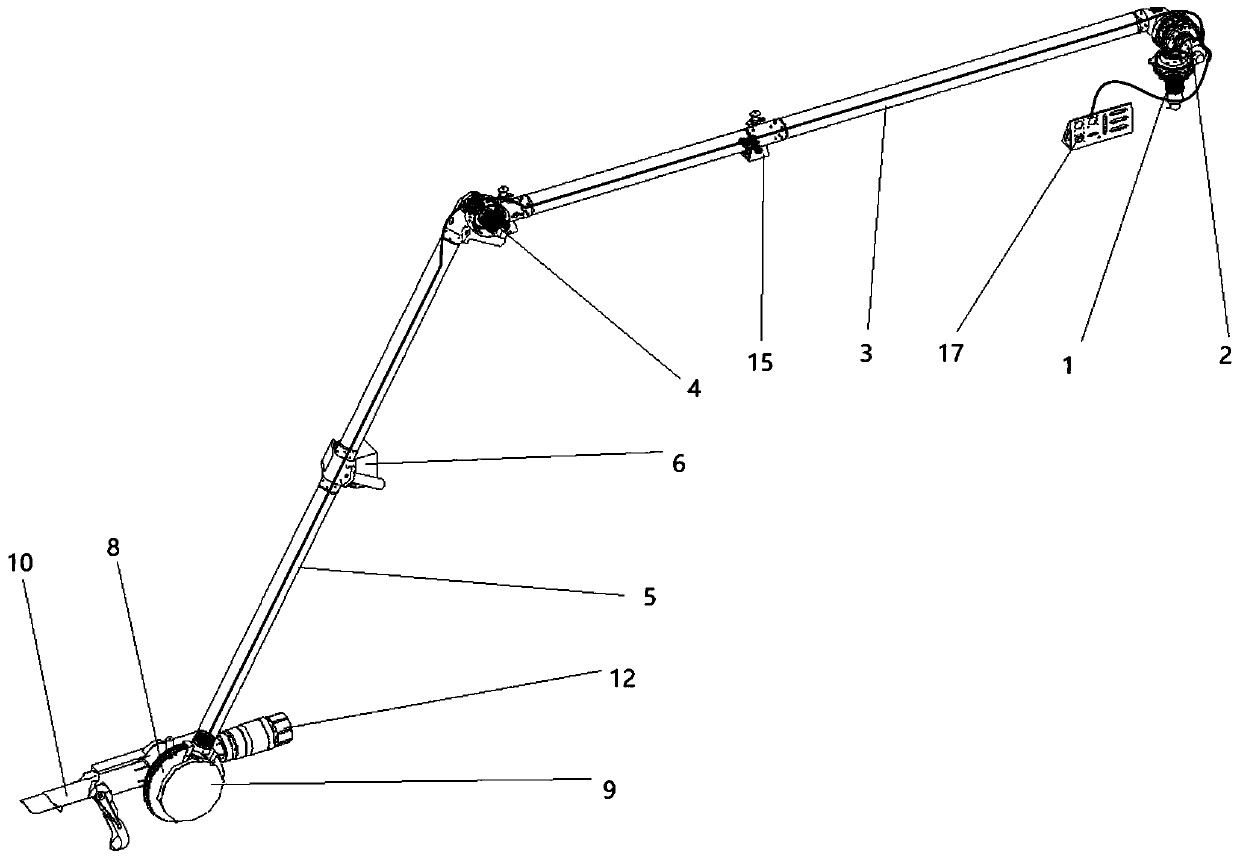
[0027] The invention provides a lunar surface sampling mechanical arm, which is a four-degree-of-freedom mechanical arm, which adopts the configuration of "shoulder (yaw and pitch joint) + elbow (pitch joint) + wrist (pitch joint)", including shoulder Yaw Joint 1, Shoulder Pitch Joint 2, Arm A Component 3, Elbow Pitch Joint 4, Arm B Component 5, Telephoto Camera 6, Wrist Pitch Joint 7, Lunar Sensing Component 8, Harness Management Box 9, Sampling Device A 10, close-up camera A 11, sampler B 12, close-up camera B 13, wrist compression release mechanism 14, middle compression release mechanism 15, elbow compression release mechanism 16 and electrical connector bracket 17, Such as figure 1 shown. The robotic arm weighs about 22.3Kg, the maximum unfolded length is about 4.16m, the length-to-diameter ratio reaches 75.9, the maximum load capacity of the lunar ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More