

Autonomous mobile apparatus returning to charger to be charged, autonomous moving method, and non-transitory computer-readable storage medium
A technology of mobile device and storage unit, which is applied in the direction of automatic control of traveling motion, circuit device, battery circuit device, etc., to achieve the effect of improving technology and improving movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
[0024] The autonomous mobile device according to the embodiment of the present invention creates a surrounding area Figure 1 The sides correspond to devices that use autonomous movement. Such uses include, for example, security monitoring, indoor cleaning, pet use, and toy use.
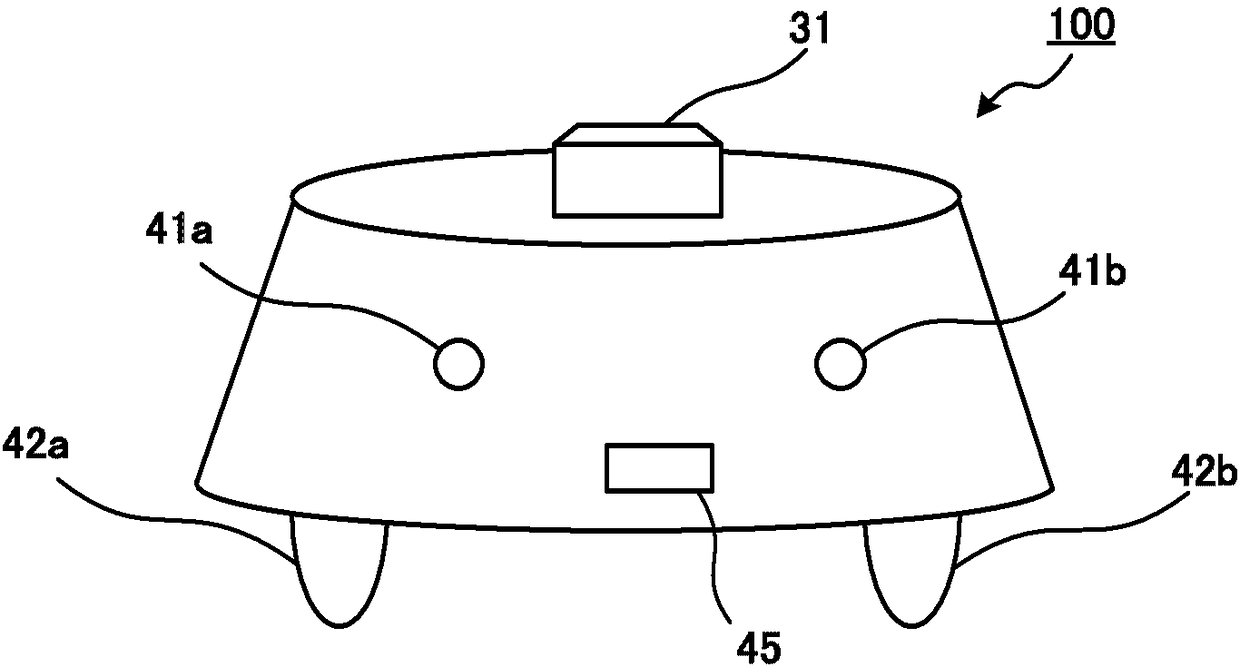
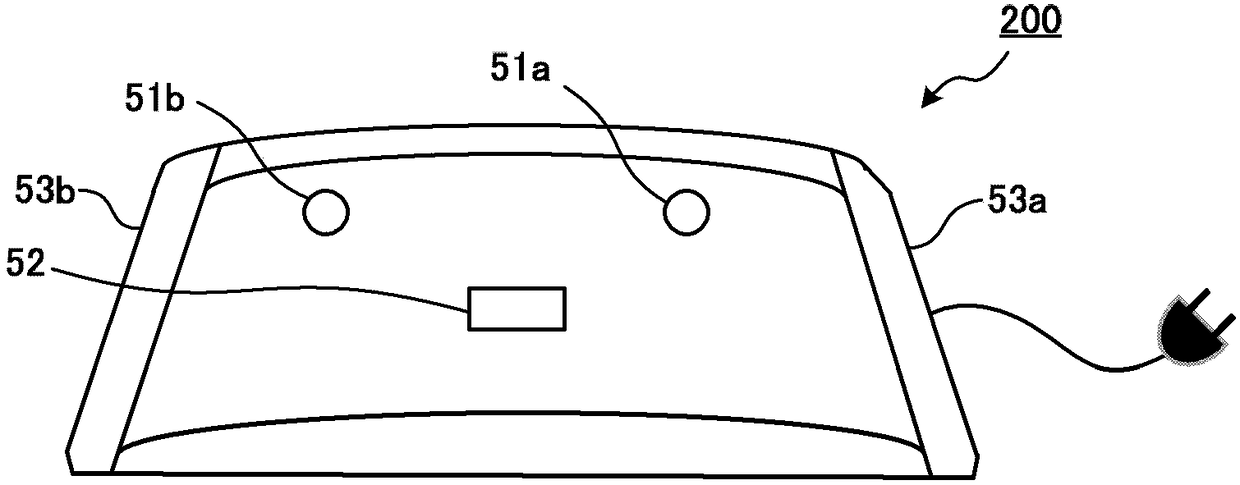
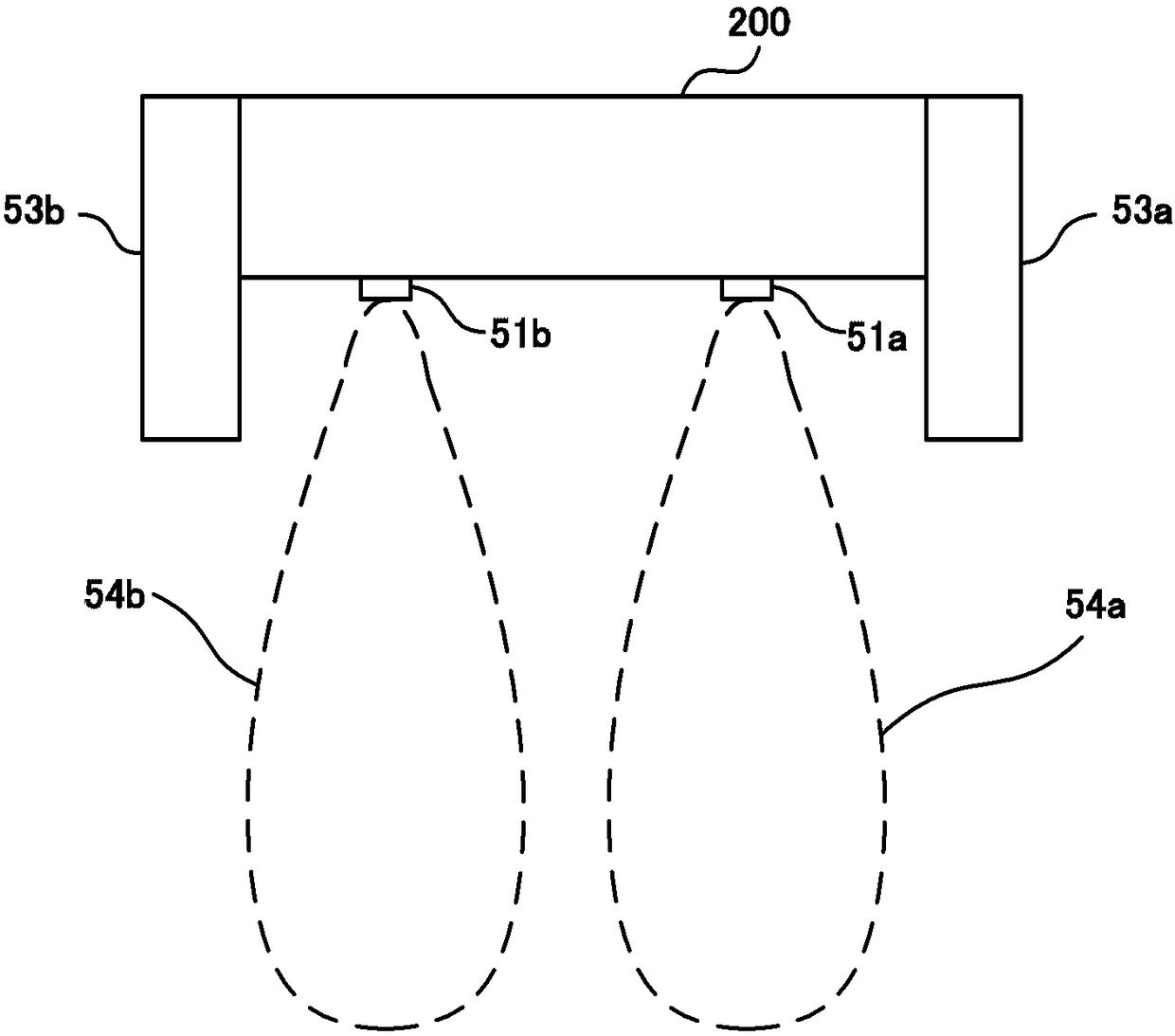
[0025] Autonomous mobile device 100 such as figure 1 As shown, it includes an obstacle sensor 31 , a return signal receiving unit 41 ( 41 a , 41 b ), a drive unit 42 ( 42 a , 42 b ), and a charging connection unit 45 in appearance. in addition, figure 1 Although not shown, an imaging unit may be provided. In addition, the charger 200 for charging the battery of the autonomous mobile device 100 such as figure 2 As shown, the return signal transmission part 51 (51a, 51b), the power supply part 52, and the guide rail 53 (53a, 53b) are provided externally.
[0026] By connecting the charging connection unit 45 of the autonomous mobile device 100 to the power supply unit 52 of the charger 200 , the ...
Embodiment approach 2
[0081] In the first embodiment described above, when the autonomous mobile device 100 cannot detect a person, the action planning unit 14 sets a large space with few surrounding obstacles 301 as the movement destination in the map stored in the map storage unit 21 . This is because there is a high probability that a person exists or passes in a large space. Next, Embodiment 2 will be described. When the autonomous mobile device cannot detect a person, the history is used to further increase the probability of being found by a person.
[0082] The functional configuration of the autonomous mobile device 101 according to Embodiment 2 of the present invention is as follows: Figure 11 As shown, the autonomous mobility device 100 according to the first embodiment has a configuration in which the history storage unit 23 and the ground sensor 33 are added. Other configurations are the same as those of the autonomous mobility device 100 according to the first embodiment.
[0083] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More