

Closed-loop control method and closed-loop control device
A closed-loop control, main controller technology, applied in program control, computer control, general control systems, etc., can solve the problems of limited amount of transmitted information, inability to form closed-loop feedback, difficult to achieve complex and accurate motion control, etc. Wiring cost and time, effect of simplified design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
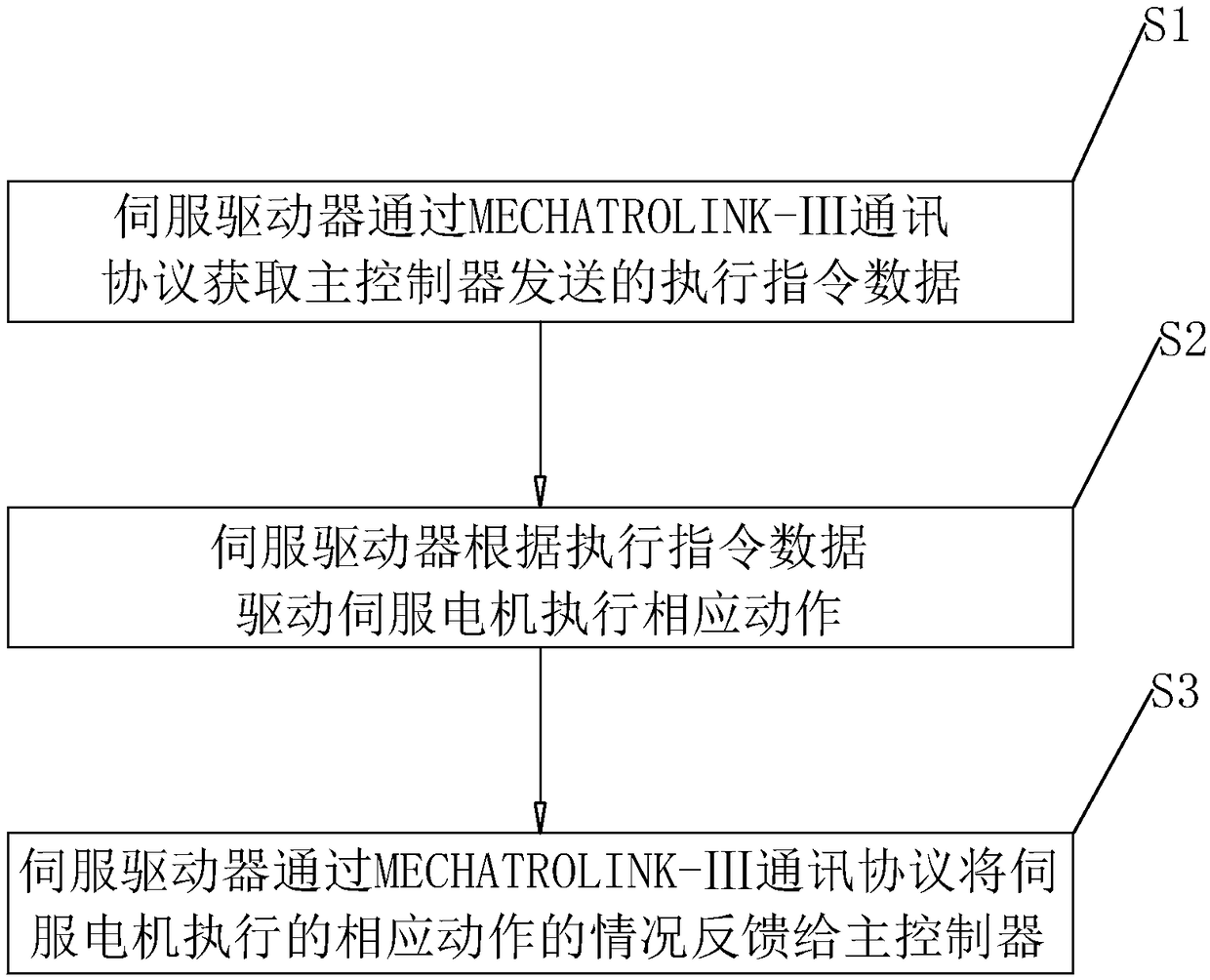
[0034] Such as Figure 1 ~ Figure 4 As shown, a closed-loop control method is specifically applied to servo drives of machine tools, industrial robots, placement machines or transmission equipment, including the following steps:
[0035] S1 obtaining step, the servo drive obtains the execution command data sent by the main controller through the MECHATROLINK-Ⅲ communication protocol; the execution command data includes the speed control data, position data and operation status data of the servo motor.
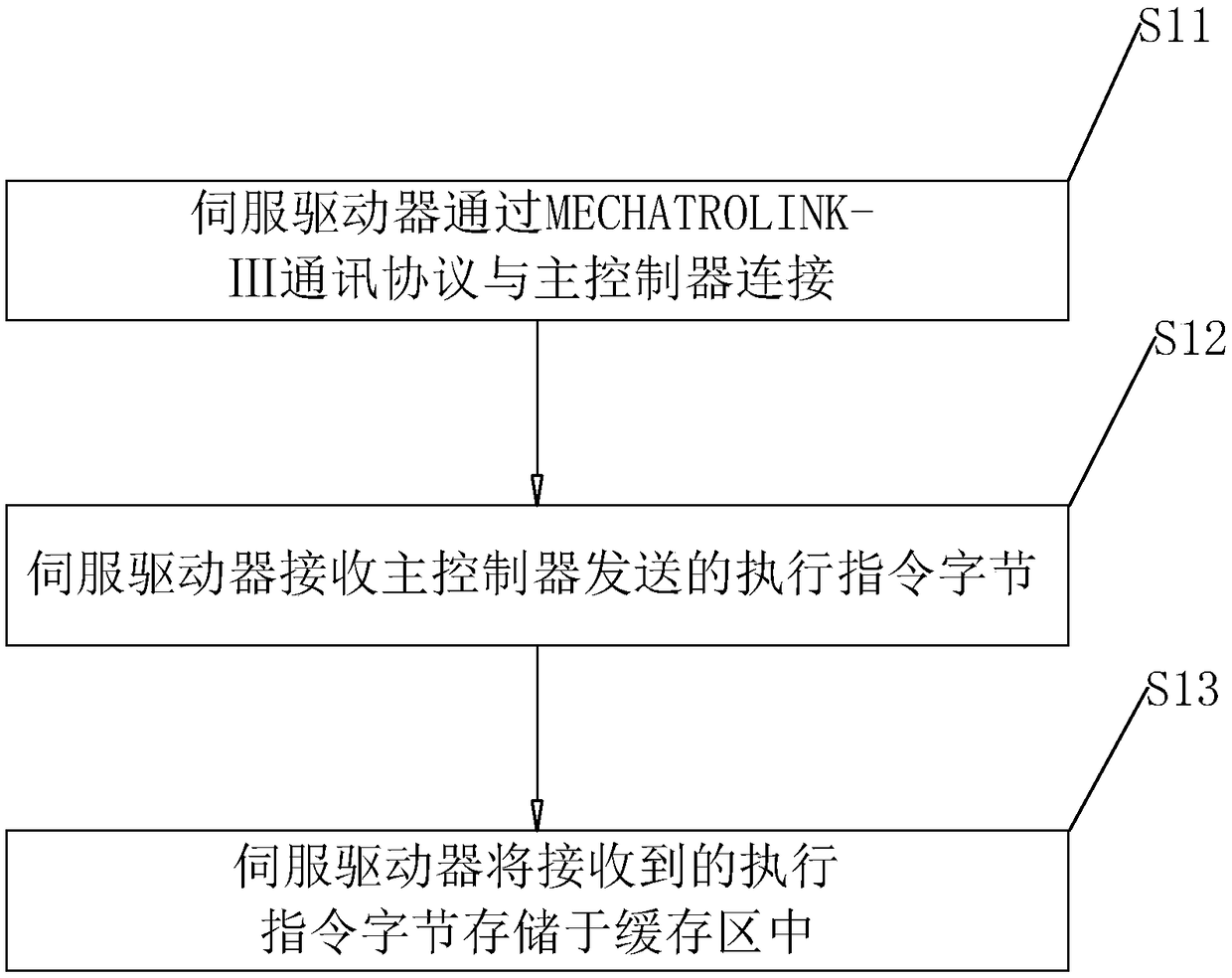
[0036] Specifically, the specific process of the S1 acquisition step is as follows:
[0037] The S11 servo drive is connected to the main controller through the MECHATROLINK-Ⅲ communication protocol;
[0038] The S12 servo driver receives the execution instruction byte sent by the main controller;
[0039] S13 The servo driver stores the received execution instruction bytes in the buffer area.
[0040] S2 execution step, the servo driver drives the servo motor to perform cor...
Embodiment 2
[0056] Such as Figure 5 As shown, a closed-loop control device includes the following steps:
[0057] The acquisition unit 20 acquires the execution command data sent by the main controller 10 through the MECHATROLINK-III communication protocol; the execution command data includes the speed control data, position data and running status data of the servo motor 40 .
[0058] Specifically, the acquisition unit is connected with the main controller 10 through the MECHATROLINK-III communication protocol, and then receives the execution command byte sent by the main controller 10 and stores it in the buffer.
[0059] The execution unit 30 drives the servo motor 40 to perform corresponding actions according to the execution instruction data.
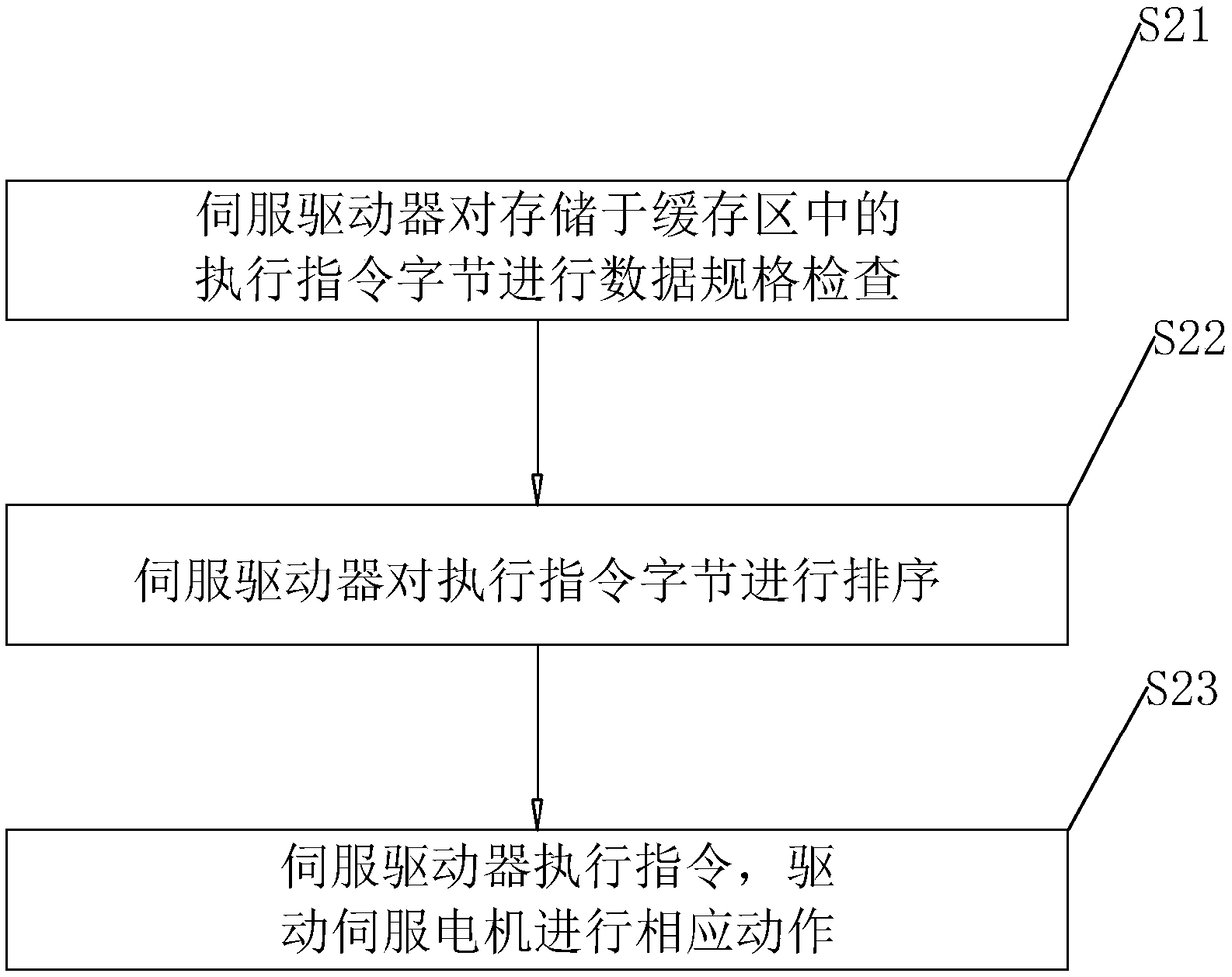
[0060] Specifically, the execution unit 30 first checks the data specifications of the execution instruction bytes stored in the cache area, then sorts the execution instruction bytes, and finally executes the instructions.
[0061] The fee...
Embodiment 3
[0065] Such as Figure 6 As shown, a servo driver includes a rectangular housing 60 , and a first circuit board 70 and a second circuit board 80 disposed in the housing 60 .
[0066] Specifically, the first circuit board 70 is provided with a main control chip 71, a MECHATROLINK-III control chip 72 electrically connected to the main control chip 71, a network interface 73 electrically connected to the main control chip 71, and a The chip 71 is electrically connected to the first interface terminal 74; the MECHATROLINK-III control chip 72 is provided with a receiving circuit and a sending circuit.
[0067] Specifically, the second circuit board 80 is provided with a capacitor 81 , a second interface terminal 82 electrically connected to the capacitor 81 , and a connection circuit electrically connected to the capacitor 81 and the main control chip 71 respectively.
[0068] Specifically, the housing 60 includes an upper cover 61, a lower cover 62 with an open right end after be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More