Target tracking and platform control system and method based on monocular vision mobile robot
A mobile robot and monocular vision technology, applied in the field of robotics, can solve problems such as reducing the difficulty of problems, limiting the application range of research results, affecting the accuracy of system state estimation, etc., achieving good real-time performance, low sensor requirements, and ensuring accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
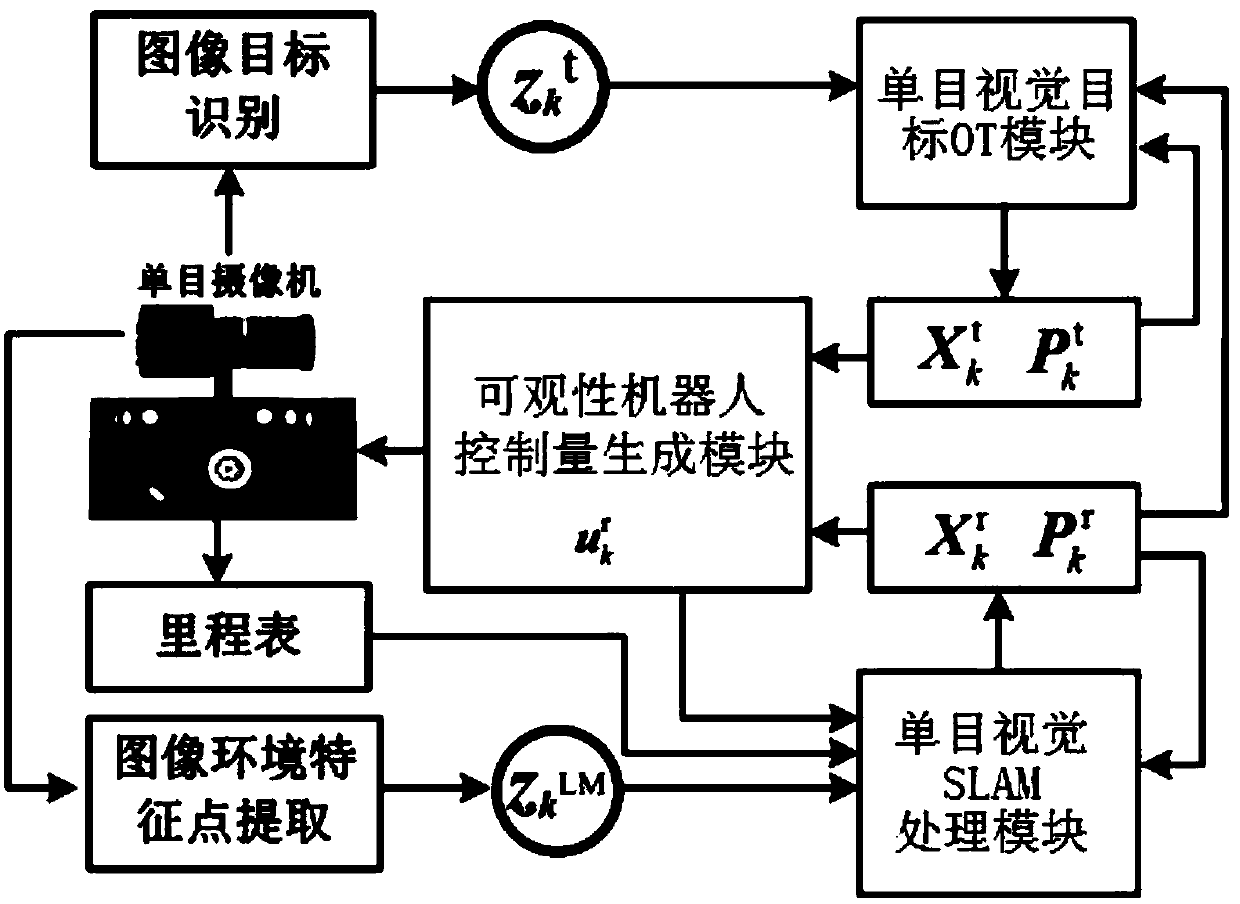
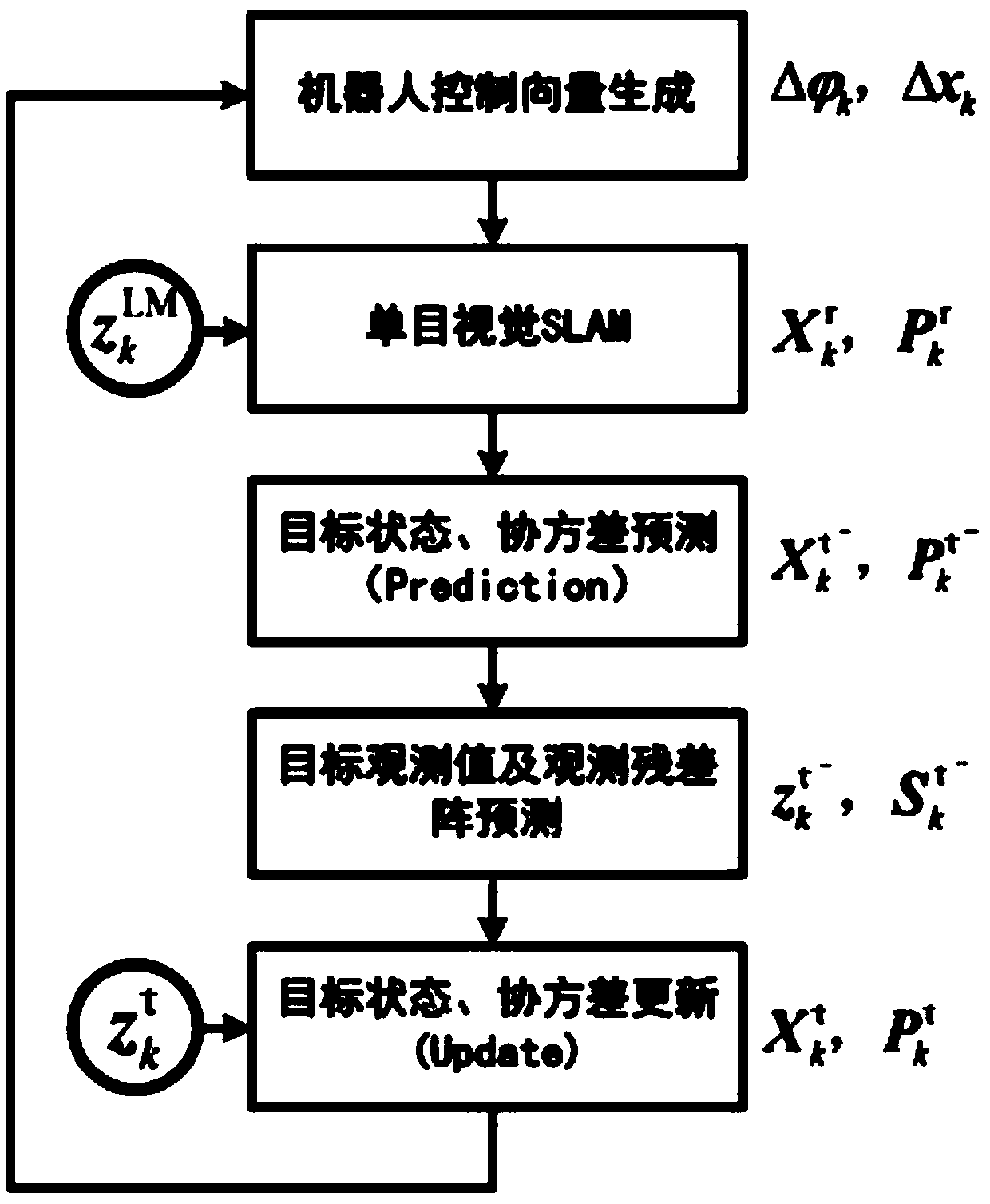
[0018] refer to Figure 1-2 , this embodiment adopts the following technical solutions: based on the monocular vision mobile robot target tracking and platform control system, including three core processing modules: monocular vision SLAM processing module, monocular vision target OT module, and observability robot control amount generation module The module and the monocular camera, the monocular camera is assembled on the top of the robot as an external sensor, and each round of observation extracts the image environment feature points from the captured pictures to obtain the environmental feature observation value And carry out image target recognition to obtain target observation value
[0019] It is worth noting that the monocular vision ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com