

Three-rotation and one-movement parallel mechanism
A parallel and unified technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems that cannot meet the needs of medical and surgical robots, and achieve the effect of easy control and implementation, easy control, and large working space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions of the present invention will be described in further detail below through specific embodiments and in conjunction with the accompanying drawings. It should be noted that, on the premise of no conflict, the various embodiments or technical features described below can be combined arbitrarily to form new embodiments.
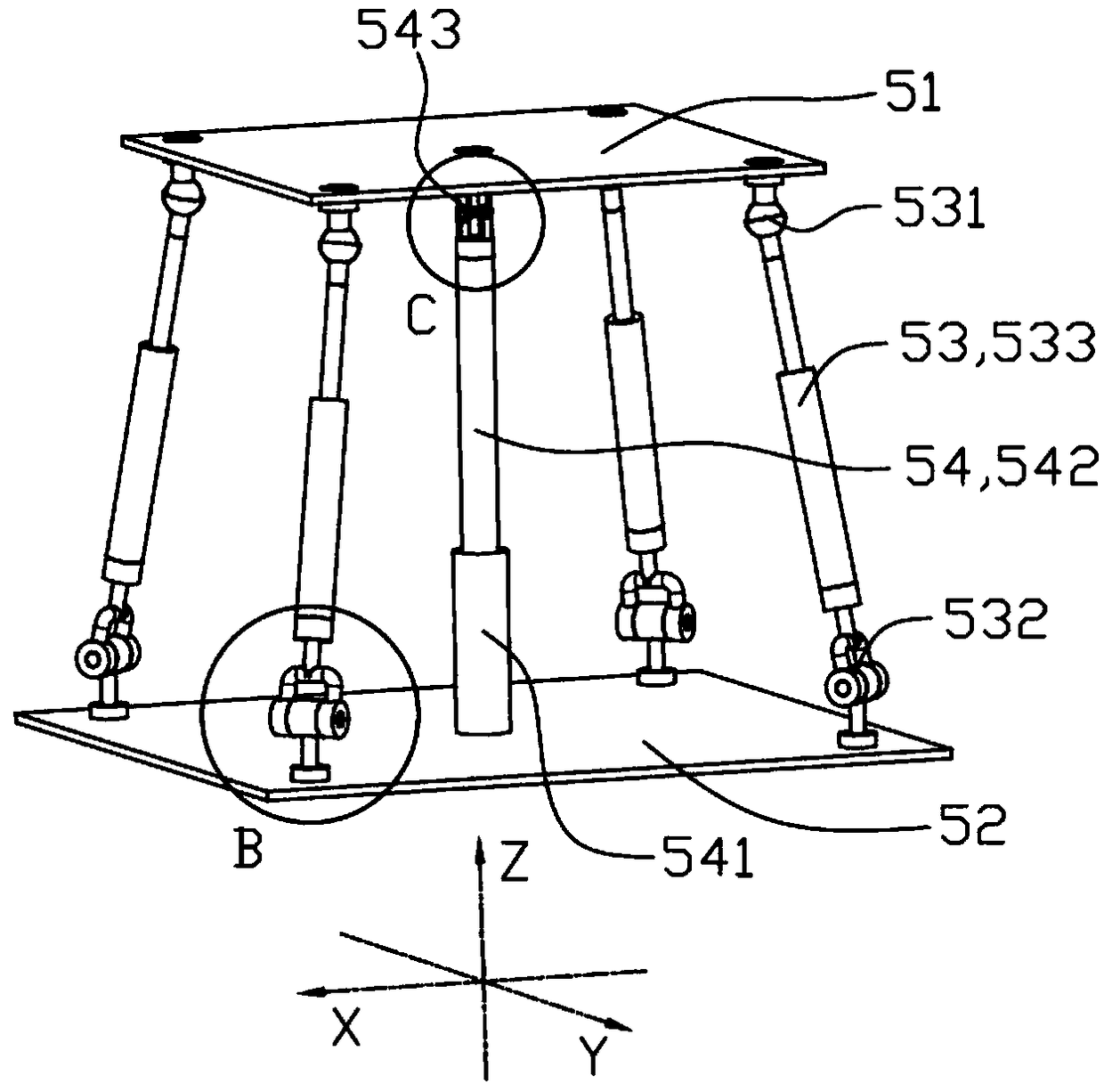
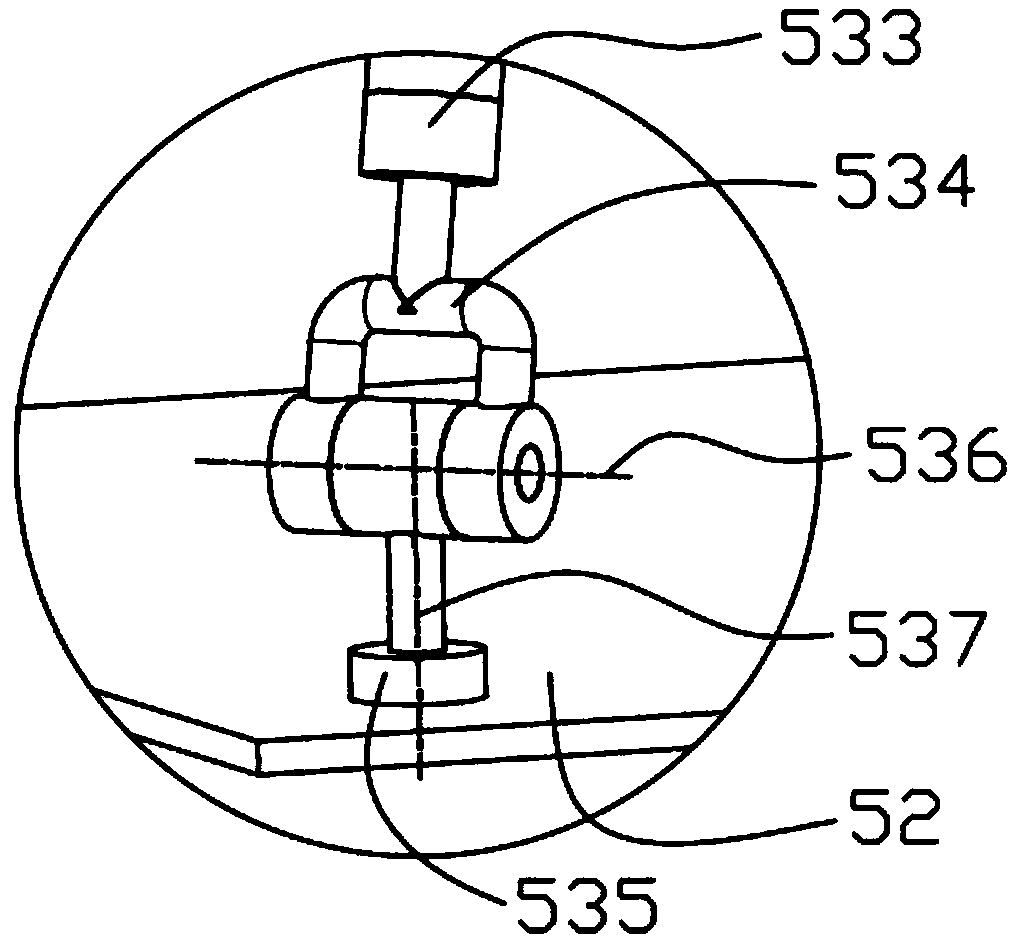
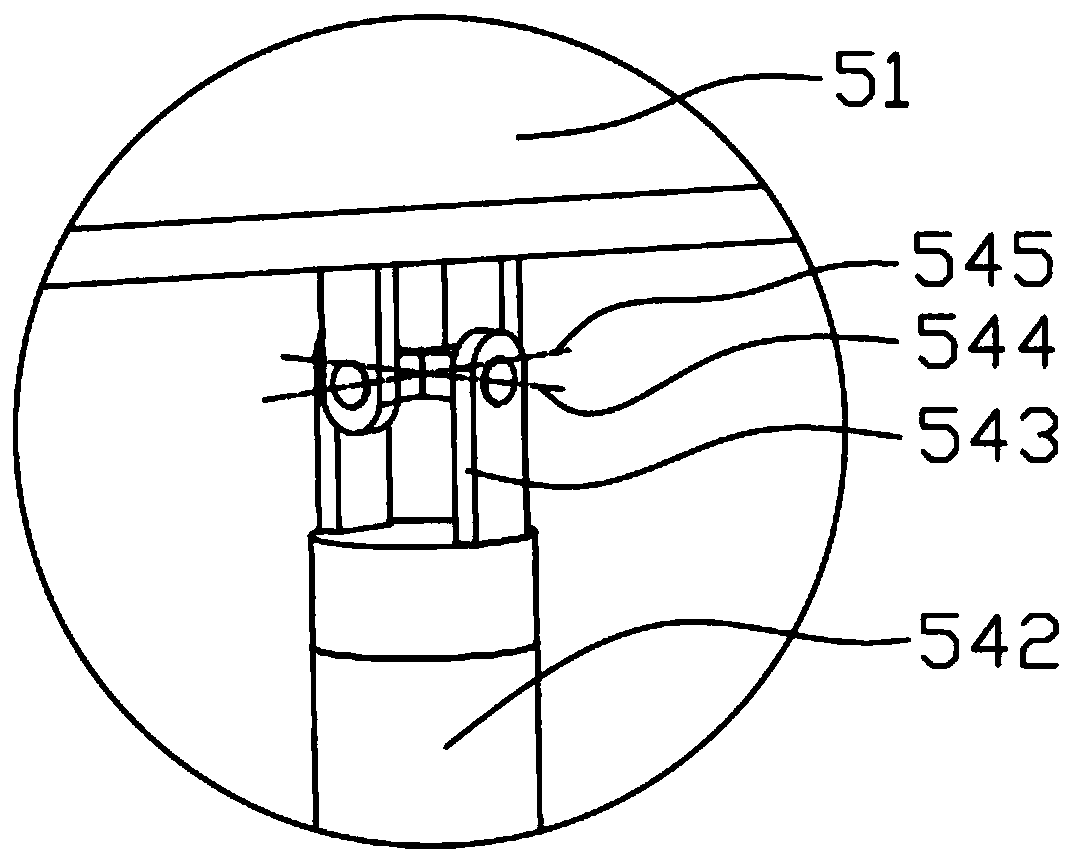
[0020] see figure 1 , a three-turn-one-shift parallel mechanism, including a moving platform 51 , a fixed platform 52 , an unconstrained branch chain 53 and a constrained branch chain 54 . There are four unconstrained branch chains 53 arranged in a rectangular distribution between the moving platform 51 and the fixed platform 52 , and one constrained branch chain 54 is arranged between the moving platform 51 and the fixed platform 52 . In this embodiment, the connection points of the four unconstrained branch chains 53 and the moving platform 51 are distributed in a square on the same circumference of the moving platform 51, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More