

An Experimental System of Zero Force Control of Manipulator Oriented to Direct Teaching
A technology of zero-force control and manipulator, which is applied in the field of manipulator zero-force control experiment system, can solve the problems of low flexibility, slow response speed and low control precision of direct teaching, so as to improve real-time performance and teaching response Increased speed, control accuracy, and improved stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
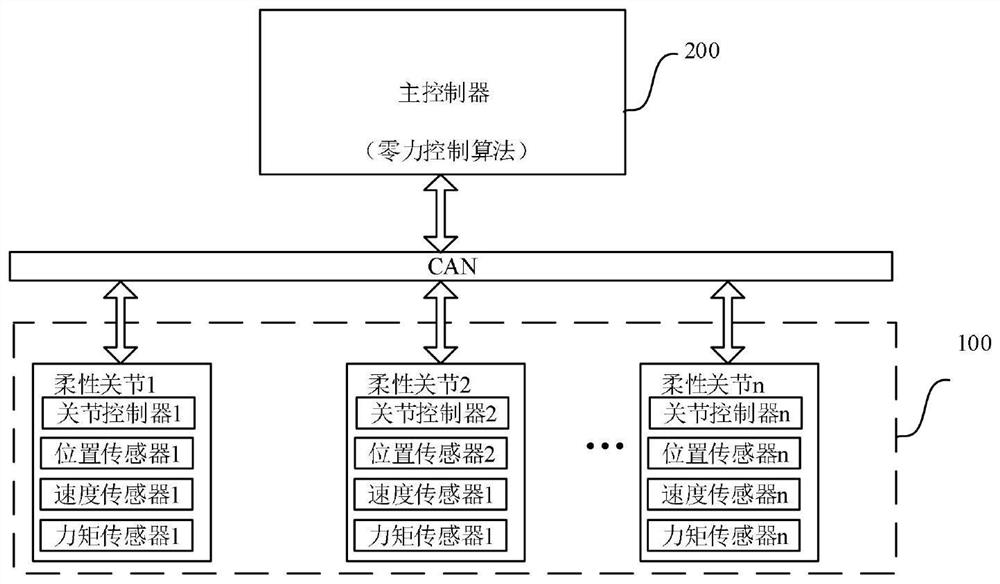
[0022] The specific embodiment of the present invention provides a zero-force control experimental system of a mechanical arm for direct teaching, refer to figure 1 , the system includes an n-degree-of-freedom mechanical arm 100 with n flexible joints and a main controller 200, each flexible joint of the mechanical arm 100 is equipped with a sensor acquisition circuit and a joint controller, each of the joint controllers is connected via a bus communication with the main controller; the sensor acquisition circuit includes a joint speed sensor, a joint position sensor and a joint torque sensor, which respectively collect the speed information, position information and torque information of the flexible joint and send them to the main controller through the main controller to perform zero-force control, obtain the compensation torque value of eac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More