

Deformable grabbing interaction method under virtual reality environment
A virtual reality, interactive method technology, applied in the input/output of user/computer interaction, graphic reading, instruments, etc., can solve the problem of estimating hand posture, achieve the effect of clear algorithm and improve interactive experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] The method of the present invention will be described in detail below through embodiments in conjunction with the accompanying drawings.
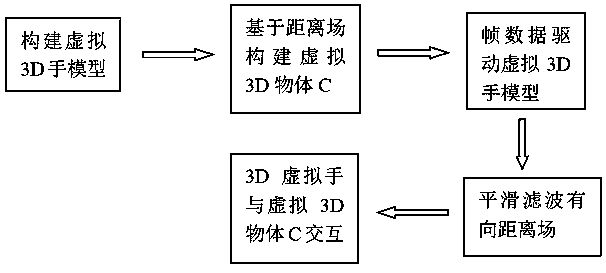
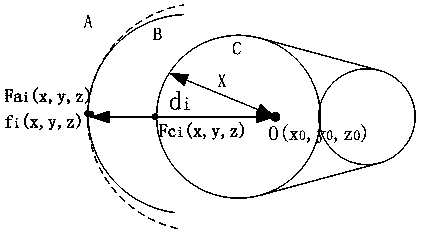
[0033] Such as figure 1 As shown, the present invention proposes a deformable hand grasping interaction method in a virtual reality environment, which mainly includes constructing and using two layers of skins to bind hand bones to form a virtual 3D hand model, and using a smoothing filter operator to construct a virtual 3D object. A directed distance field is smoothed, and then the distance field is used to drive the deformation of the contact surface of the virtual 3D hand model. Specific steps are as follows:
[0034] 1) Construct a virtual 3D hand model;
[0035]Firstly, according to the geometric model of the hand, a virtual 3D hand skeleton is built in 3D animation editing software, such as Maya. Then keep the same two-layer skin (skin A and skin B) in real time according to the position and rotation angle (skin A is the bou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More