

AUV (Autonomous Underwater Vehicle) return-dock navigation system and method based on electromagnetic wave attenuation principle
A navigation method and navigation system technology, applied in the field of underwater vehicle recovery and docking, can solve the problems of increased difficulty and cost of implementation, high cost of positioning system, and interference of sound wave reflection, and achieve low cost, pollution-free and stable marine environment good sex effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described in detail below with reference to the accompanying drawings and embodiments. It should be noted that the following embodiments are intended to facilitate the understanding of the present invention, but do not limit it in any way.
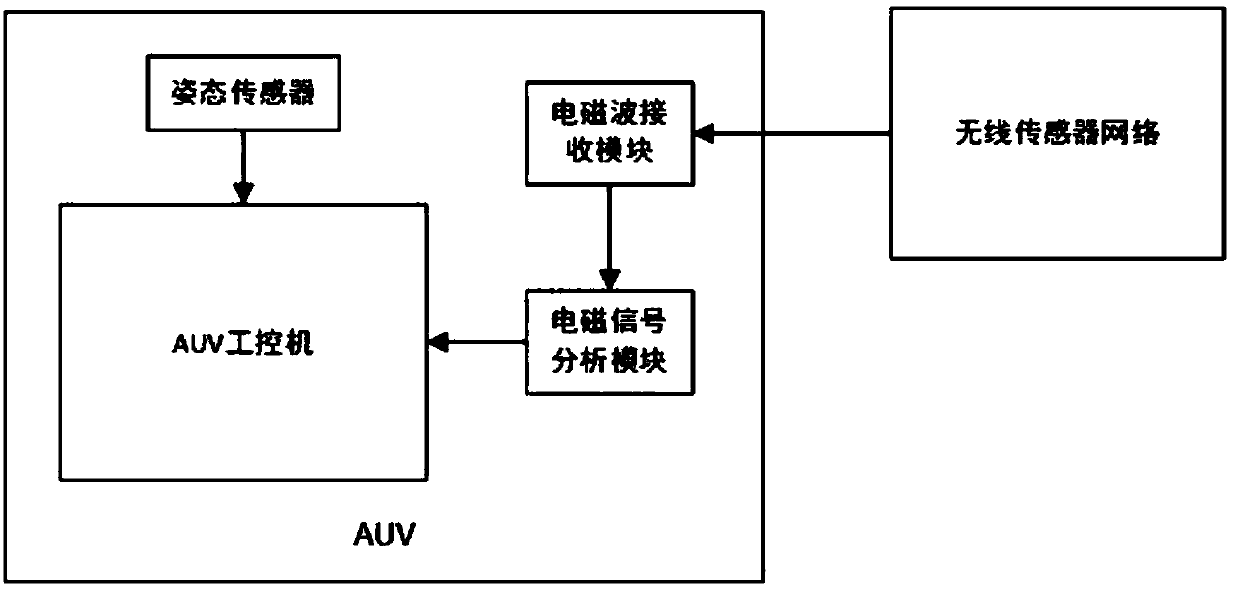
[0051] Such as figure 1 As shown, the AUV docking navigation system based on the principle of electromagnetic wave attenuation includes an electromagnetic wave receiving module, an electromagnetic signal analysis module and an industrial computer mounted on the AUV (autonomous underwater vehicle), and an underwater wireless sensor arranged in the AUV docking area The internet.
[0052] The electromagnetic wave receiving module is connected to the electromagnetic signal analysis module through the SMA cable, and the electromagnetic signal analysis module is connected to the industrial computer in the AUV through the USB interface.
[0053] The electromagnetic wave receiving module is composed of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More