

Synchronous calibration method for zero deviation and load parameters of robot end force sensor
A technology of force sensor and calibration method, which is applied in the direction of instrument, force/torque/power measuring instrument calibration/testing, measuring device, etc., can solve the problem that gravity parameters are difficult to obtain accurately, and achieve strong applicability, small space range, Identifying the Effects of Movement Simple
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
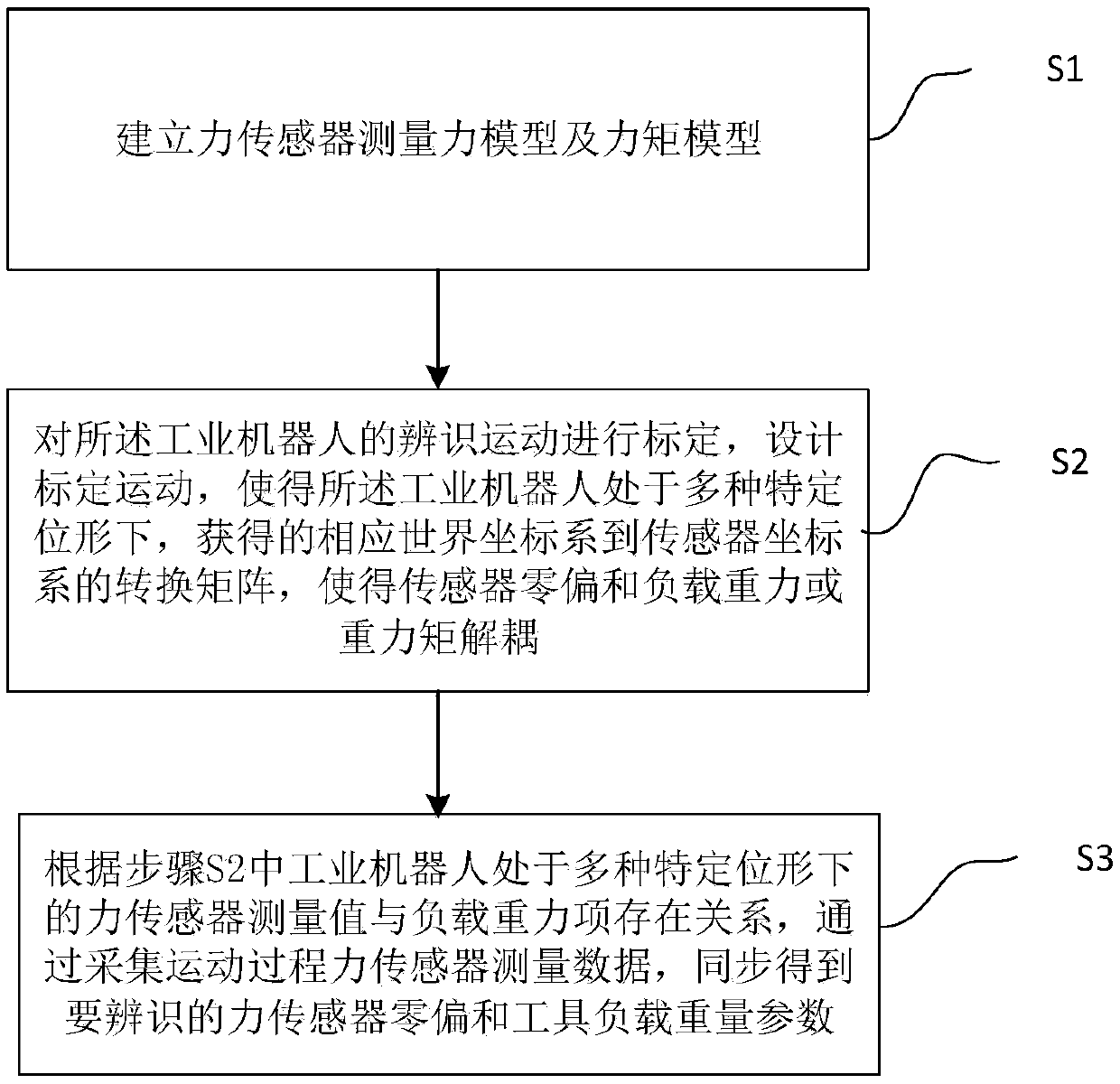
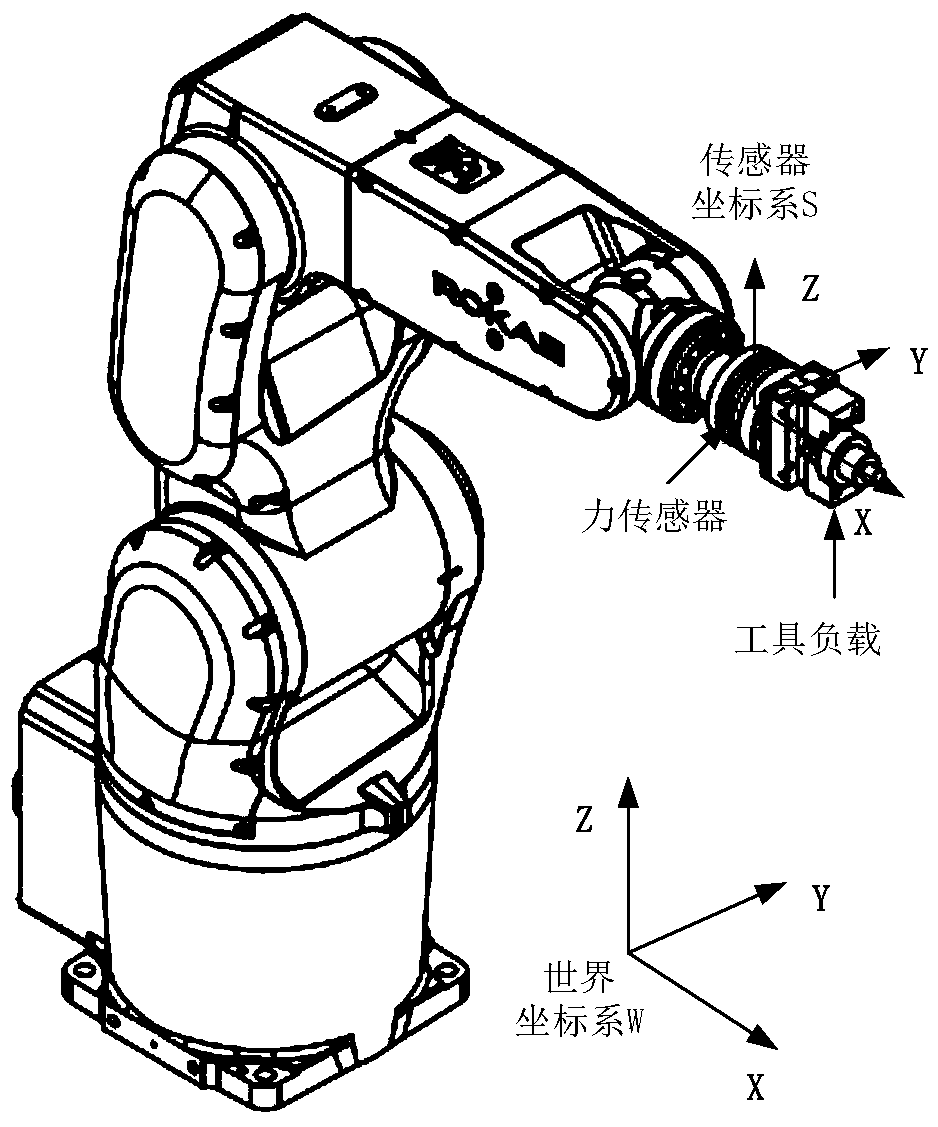
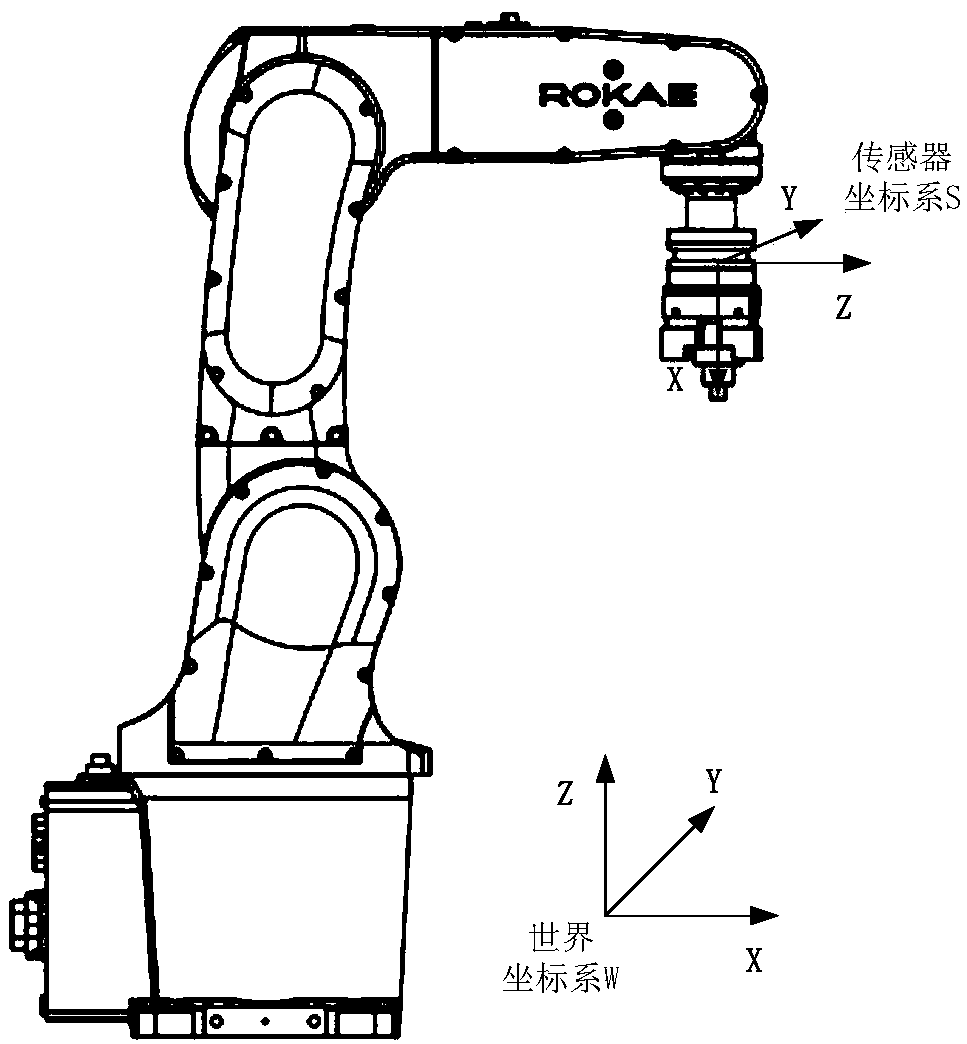
[0036] The invention provides a method for synchronously calibrating the zero bias of the robot end force sensor and the load parameters. The method includes two parts: calibration design and processing of the force sensor zero bias and load gravity parameters. The calibration motion design makes the end force sensor In a specific posture, the conversion matrix that decouples the force sensor zero bias and load gravity parameters is obtained; the force sensor zero bias and load gravity parameters are processed, and the sensor data...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More