

Trajectory-controllable pruning method based on tree climbing of robot
A robot and pruning technology, which is applied to electric pruning saws, botanical equipment and methods, agricultural machinery and implements, etc., can solve the problem of uncontrollable helix angle of climbing robots, adverse effects on economic benefits of fast-growing forests, and forestry work. Problems such as low pruning efficiency of personnel, to achieve the effect of improving pruning efficiency, simple and reliable structure, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] A kind of robot climbing tree pruning method of controllable trajectory of the present invention, comprises the following steps:
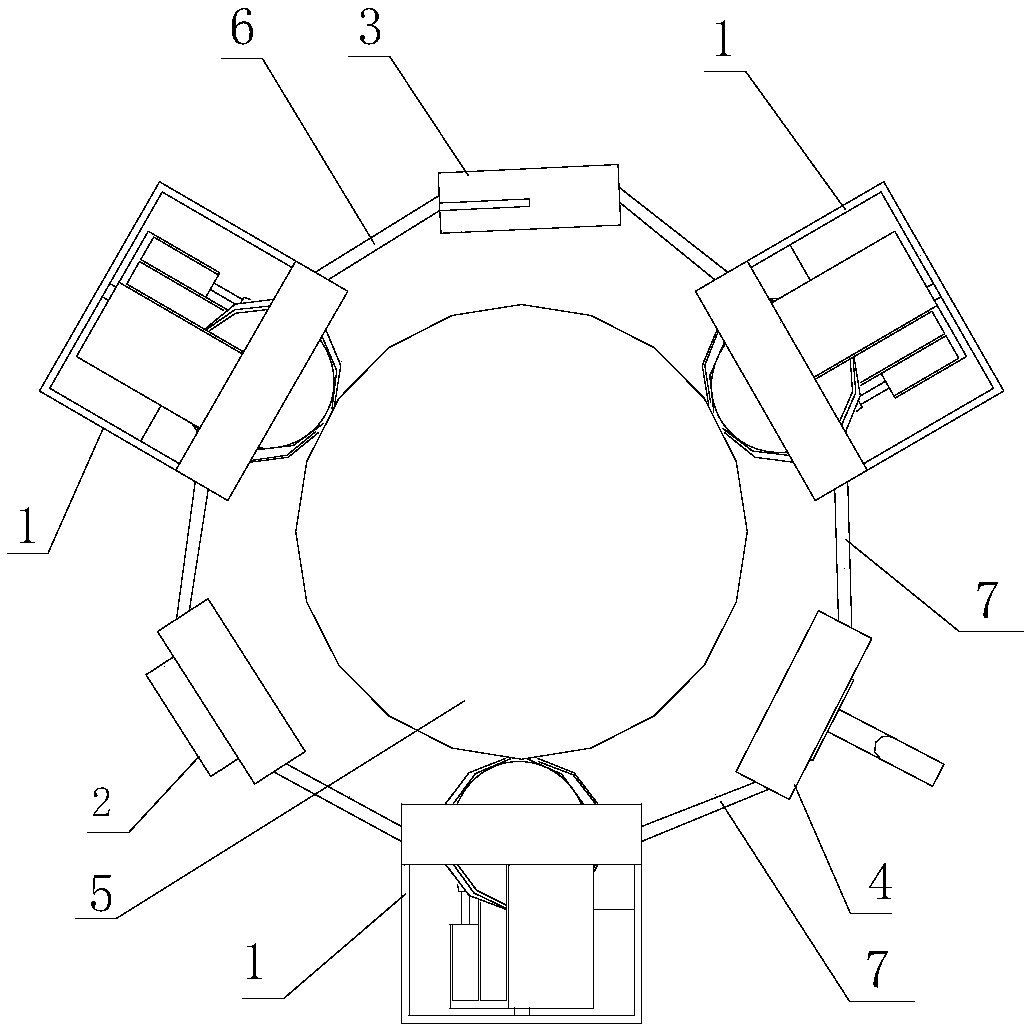
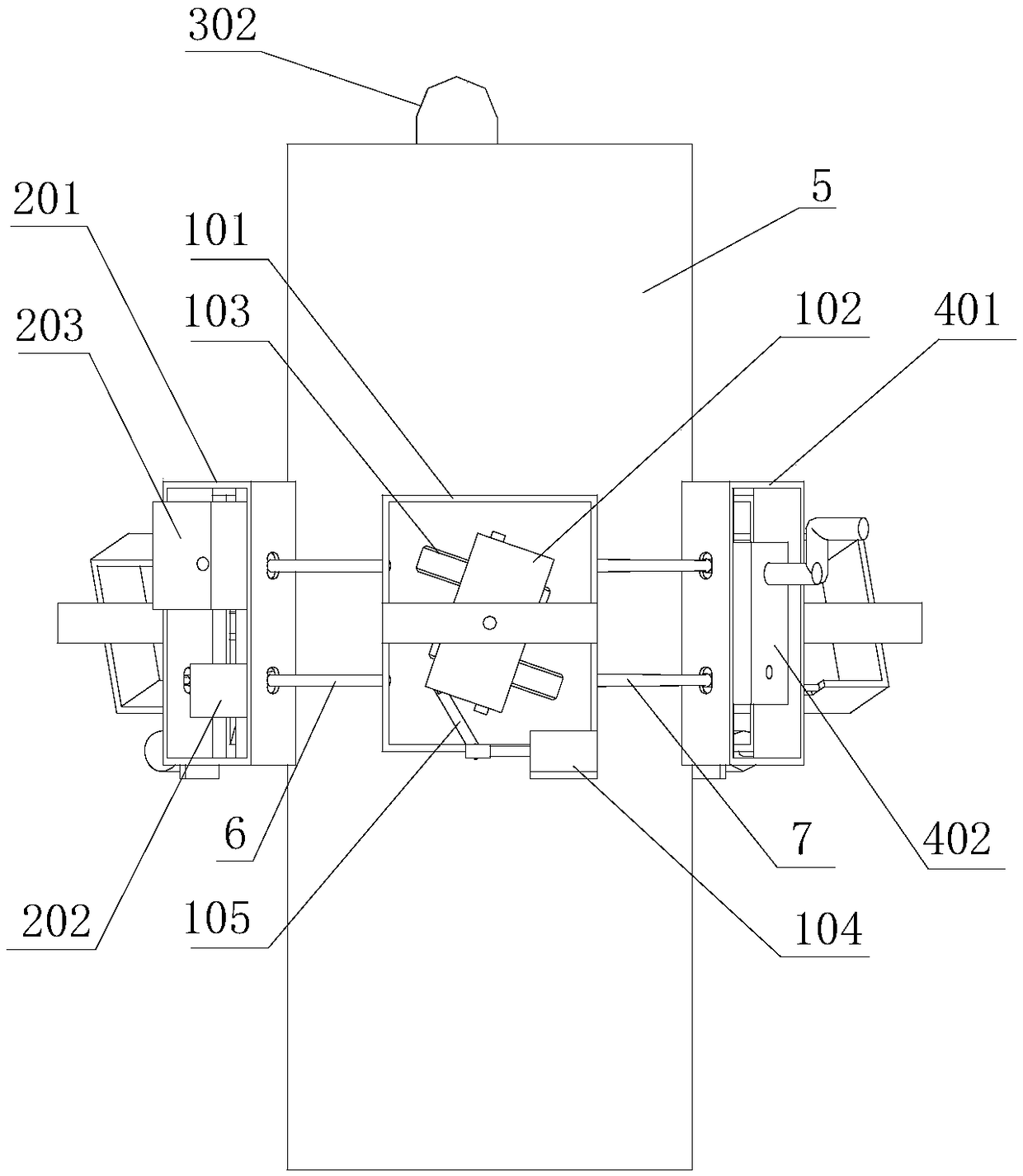
[0035] Installation and fixation: install the tree climbing robot on the trunk of the tree to be trimmed, so that the driving wheel of the tree climbing robot is close to the surface of the trunk;
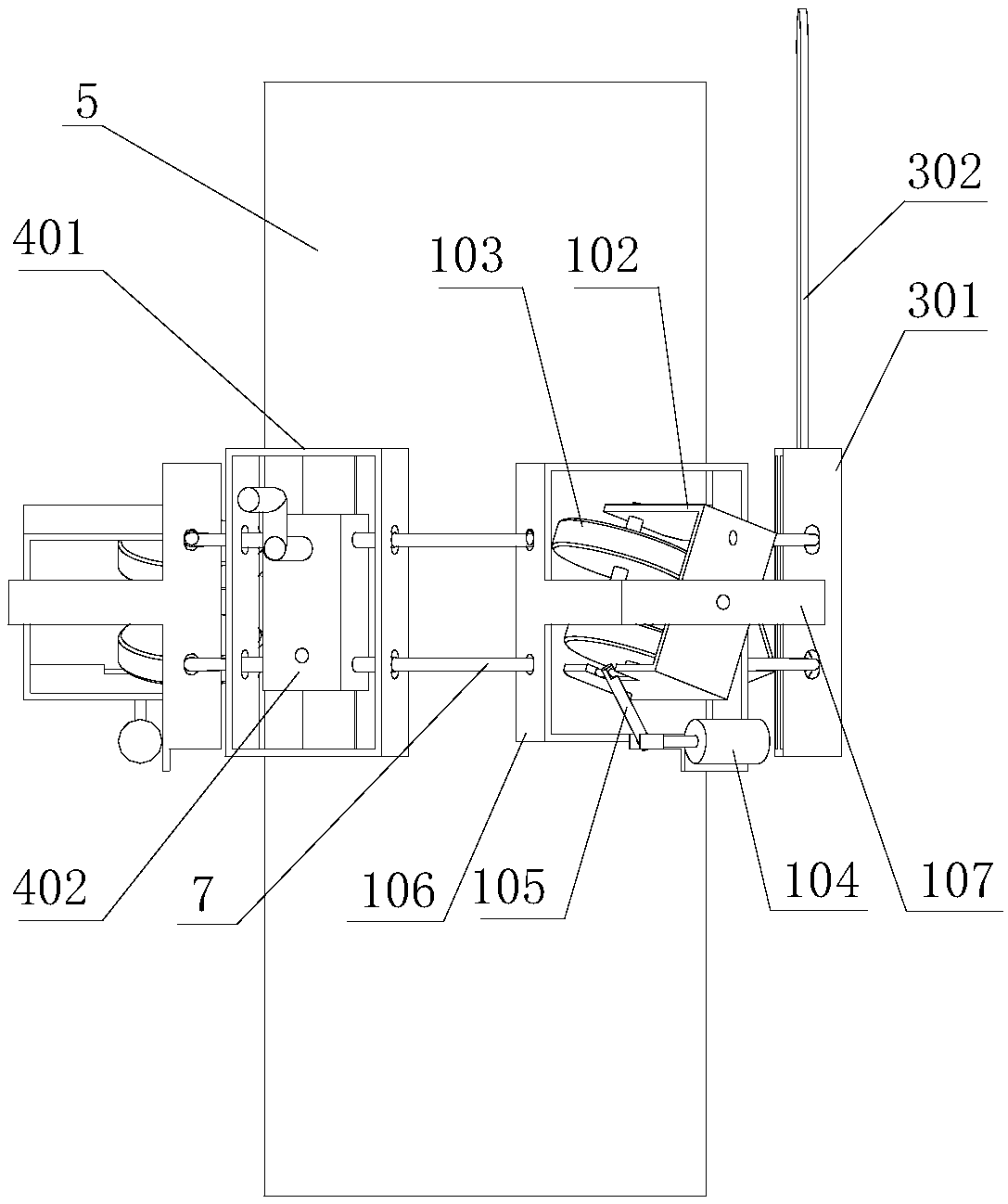
[0036] Adjust the helix angle: adjust the angle between the driving wheel of the tree climbing robot and the trunk axis, and select an angular position;
[0037] Tree climbing and pruning: control the rotation of the driving wheel of the tree climbing robot, the tree climbing robot climbs up around the trunk surface at a certain spiral angle, and at the same time control the work of the electric chain saw of the tree climbing robot, so that the electric chain saw follows the tree climbing robot climbing for pruning;
[0038] Adjust the helix angle in the middle: During the pruning process, adjust the angle between the driving wheel of the tree c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More