

A tracking three-dimensional scanning method and system in a vibrating environment
A three-dimensional scanning and tracking technology, applied in the field of optical scanning, can solve the problems of cumbersome pasting of marking points, failure to meet the measurement requirements, and increase the workload of scanning and measurement, etc., to achieve expandable working space, wide application range, and convenience The effect of 3D reconstruction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
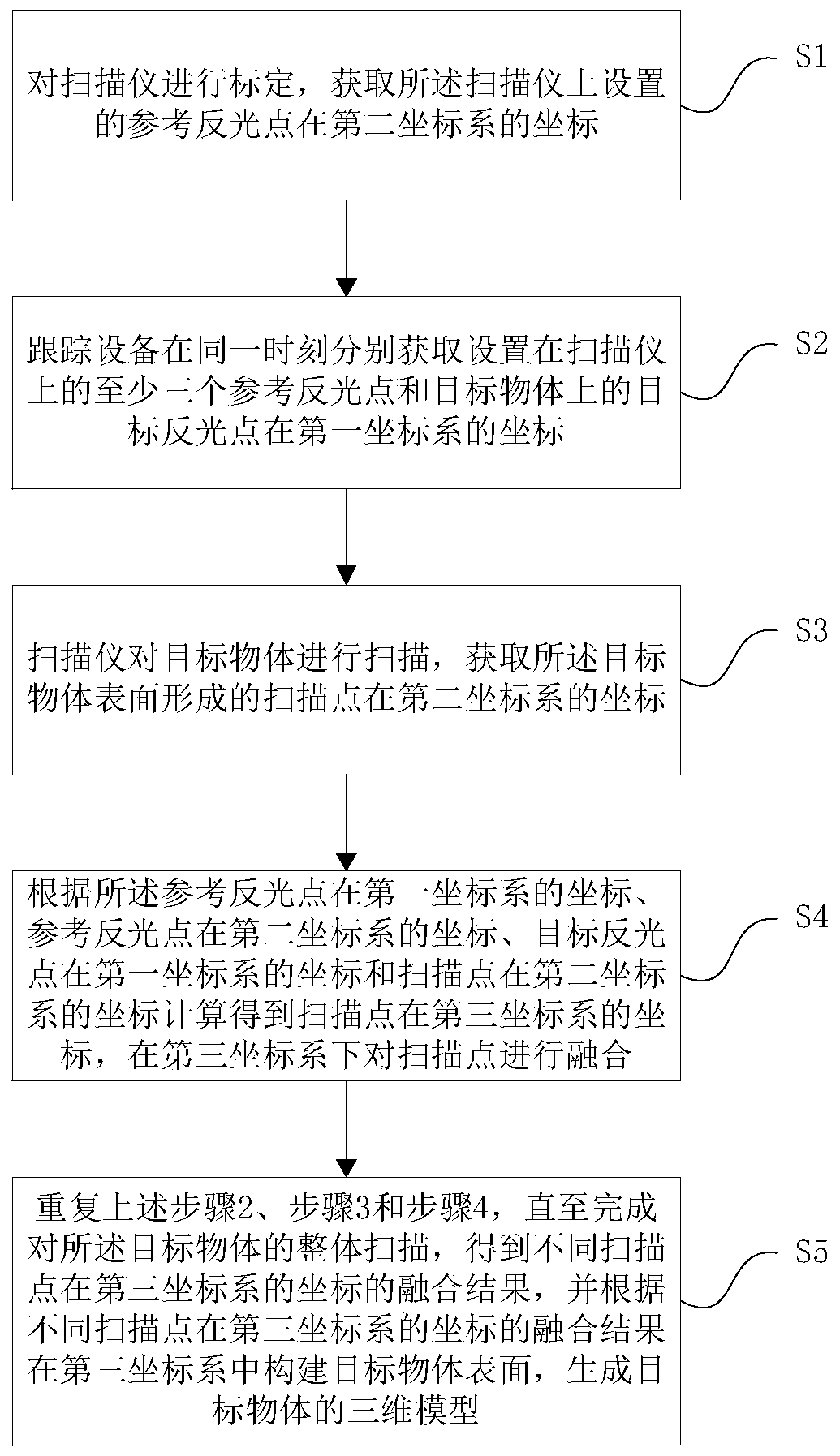
[0068] Such as figure 1 As shown, a tracking type three-dimensional scanning method in a vibration environment includes the following steps:
[0069] Step 1: Calibrate the scanner, and obtain the coordinates of the reference reflective point set on the scanner in the second coordinate system;
[0070] Step 2: The tracking device respectively obtains the coordinates of at least three reference reflective points set on the scanner and the target reflective point on the target object in the first coordinate system at the same time;
[0071] Step 3: The scanner scans the target object, and obtains the coordinates of the scanning point formed on the surface of the target object in the second coordinate system;
[0072]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More