

Design method for curve trajectory tracking controller
A tracking controller and design method technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of reducing system robustness, cumbersome processing flow, phase lag, etc., and achieve stable and accurate tracking , to avoid the cumbersome process, to avoid the effect of phase lag
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
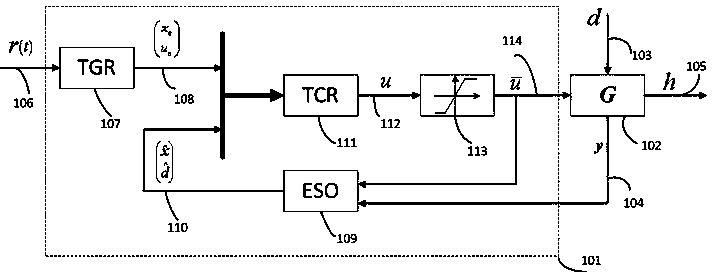
[0050] Please refer to figure 1 , the present invention provides a kind of design method of curve track tracking controller, it is characterized in that: comprise the following steps:
[0051] Step S1: Construct a trajectory generator according to the target trajectory signal, and generate a steady state value and an auxiliary control signal corresponding to the state vector of the servo system model;
[0052] Step S2: Incorporate the unknown disturbance of the system into the servo system model as an extended state quantity to obtain an augmented servo system model; design a reduced-order extended state observer based on the augmented servo system model to obtain the original state vector and unknown disturbance of the system estimated value of
[0053] Step S3: design the trajectory tracking control law according to the steady state value and the au...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More