

Uncalibrated target region positioning and tracking method based on surgical robot system
A surgical robot, positioning and tracking technology, applied in the field of surgical robots, can solve the problems of robot motion error, long time-consuming data collection, etc., achieve stable and accurate positioning and tracking, save preoperative preparation time, and improve overall efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] It should be noted that the embodiments in the present application and the features of the embodiments may be combined with each other without conflict, and the present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
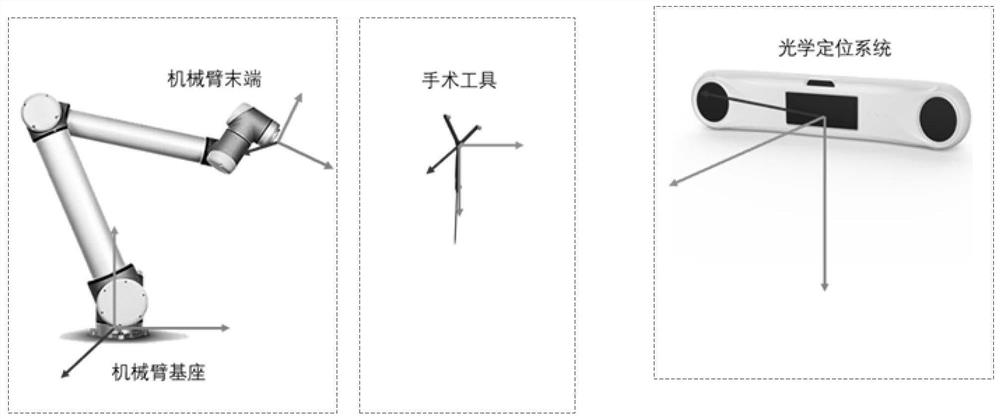
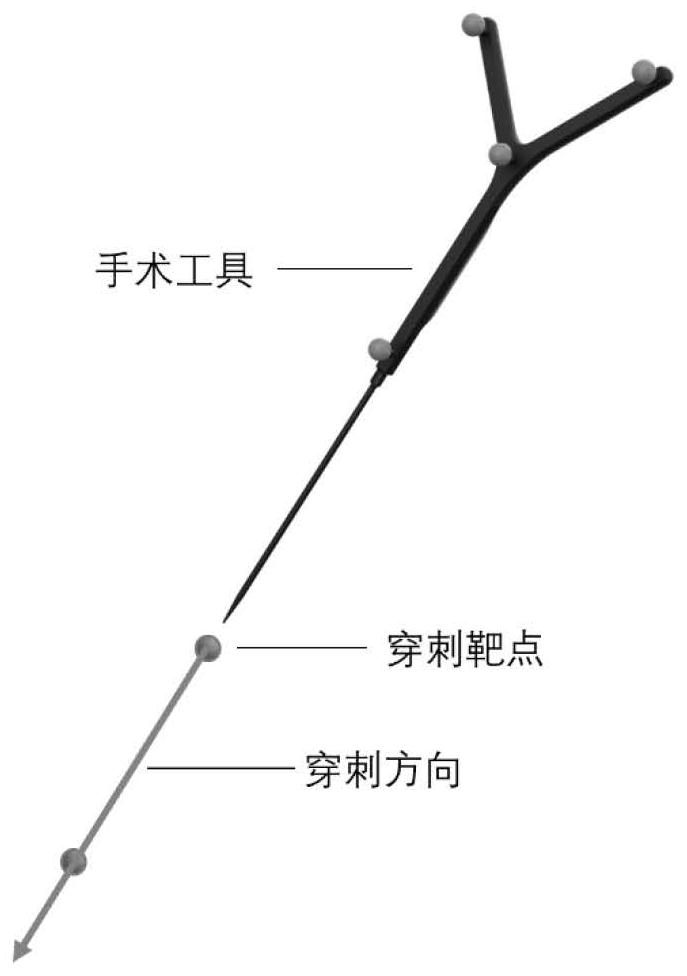
[0089] The surgical robot-based system of the present invention adopts an Eye-to-Hand configuration, the optical positioning system is placed in front of the robotic arm, and it is necessary to ensure that the field of view of the optical positioning system can completely cover the working space of the robotic arm. The surgical robot system includes a 6DOF robotic arm, a near-infrared optical locator, surgical tools, and reflective marking balls. The reflective marker ball is a small ball with a reflective coating on the surface, which can effectively reflect near-infrared light; 4 reflective marker balls are installed on the surgical tool, and the position information of the marker ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More