

Operation table for puncture robot
A robot and operating table technology, applied in surgical robots, puncture needles, trocars, etc., can solve the problems of limited stability and accuracy, affect the use effect, complex motion control, etc., and achieve high motion positioning accuracy and high positioning accuracy. , the effect of smooth motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described in detail below with reference to the drawings and specific embodiments.
[0024] In the present invention, unless otherwise clearly specified and limited, the terms "installed", "connected", "connected", "fixed" and other terms should be understood in a broad sense, for example, it may be a fixed connection or a detachable connection , Or integrated; it can be a mechanical connection or an electrical connection; it can be directly connected or indirectly connected through an intermediate medium, and it can be the internal communication of two components or the interaction relationship between two components. For those of ordinary skill in the art, the specific meaning of the above-mentioned terms in the present invention can be understood according to specific circumstances.
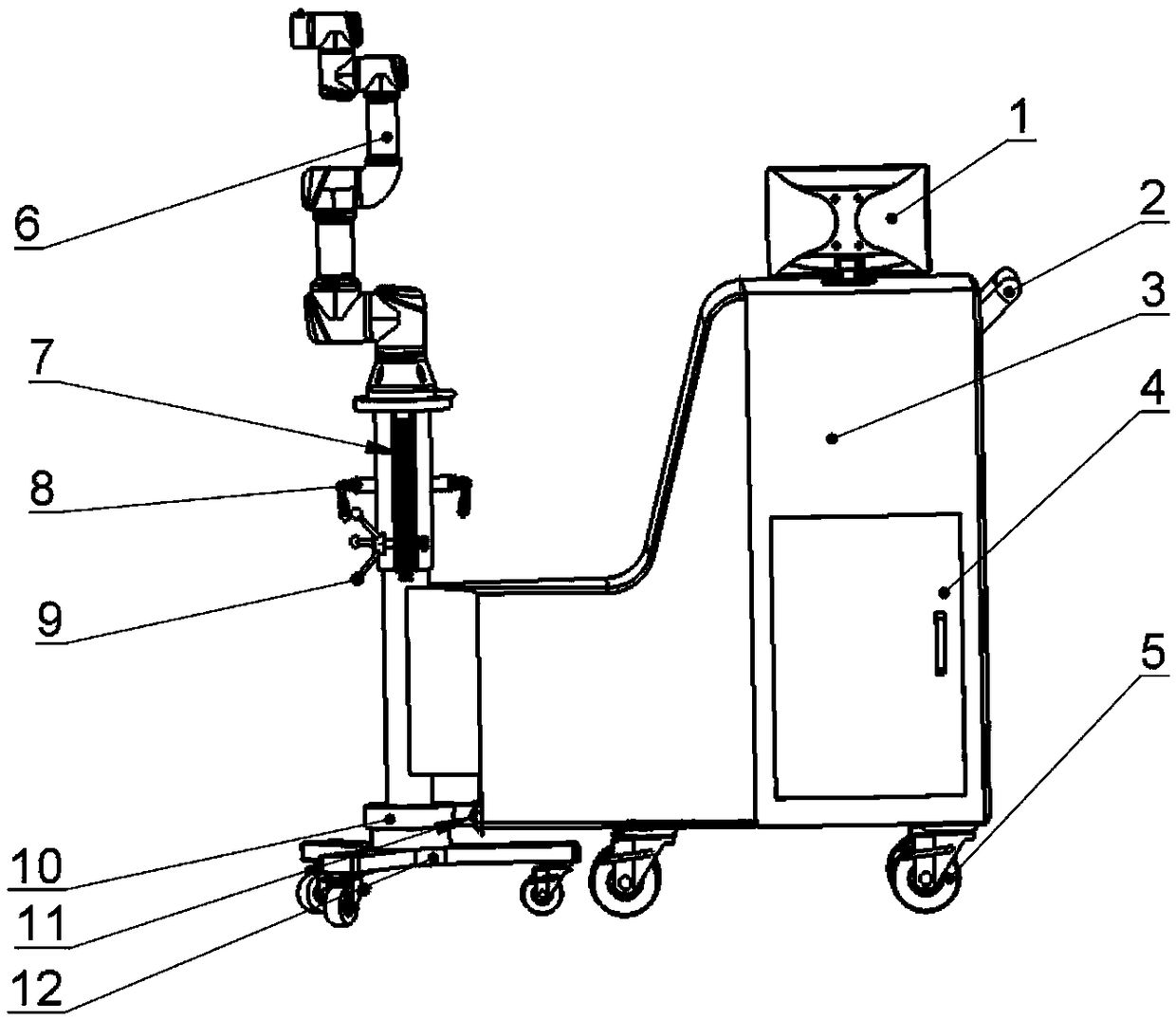
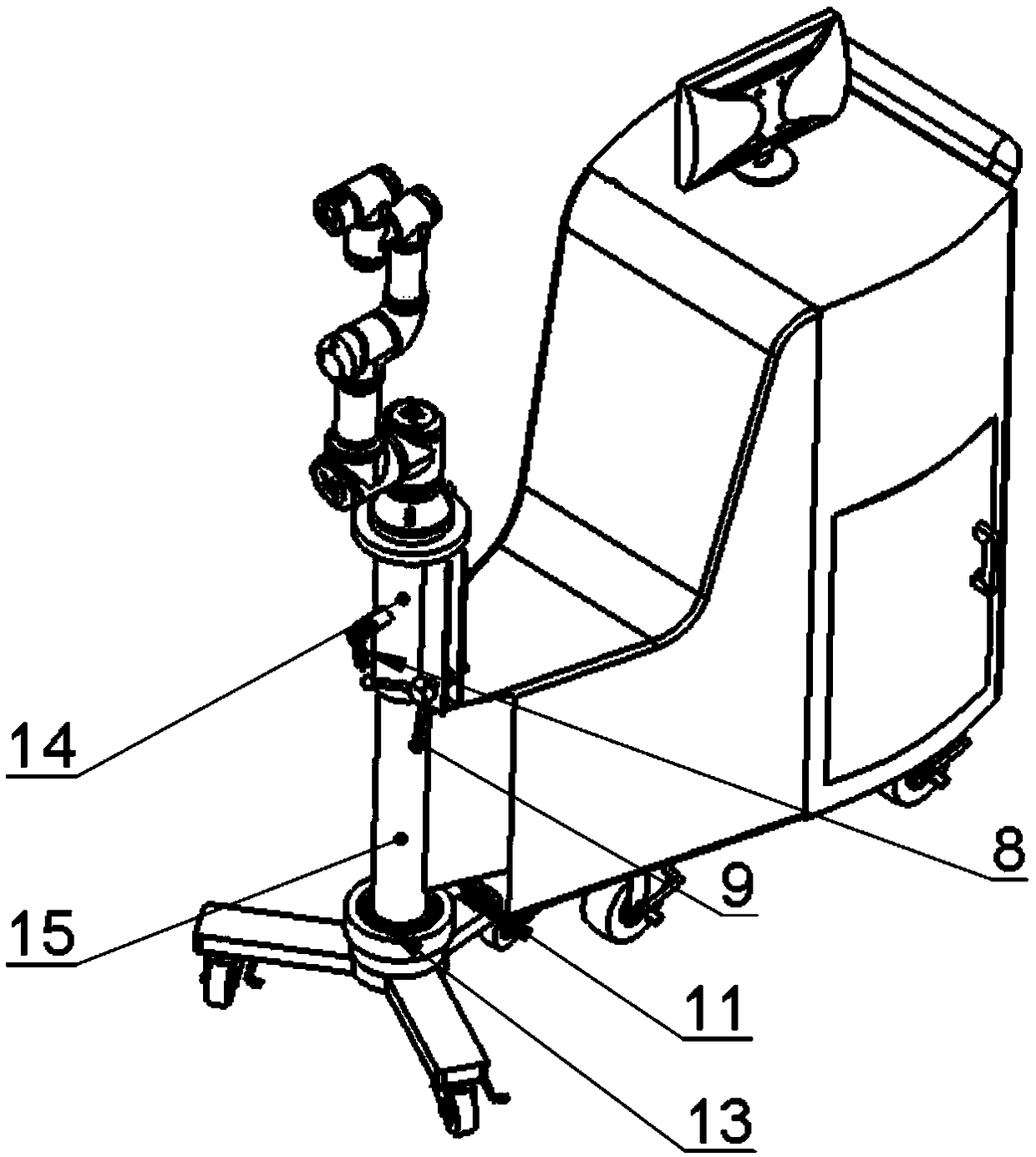
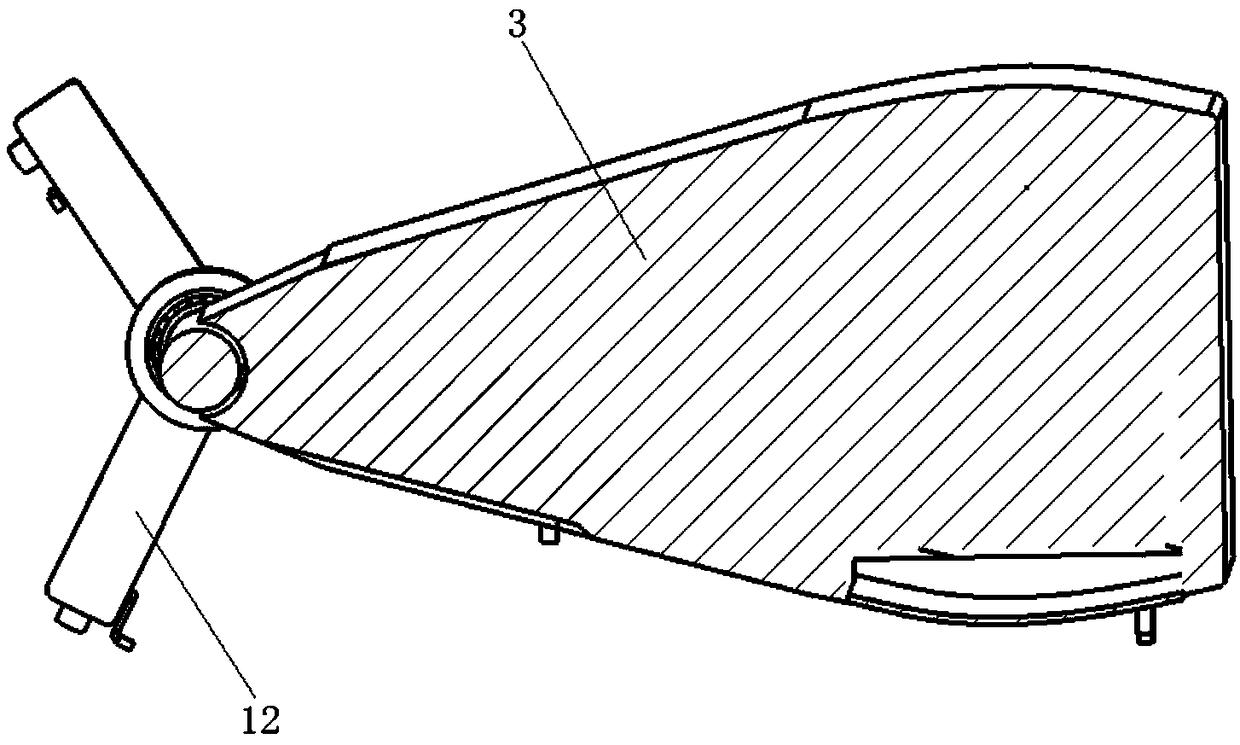
[0025] Such as Figure 1-3 As shown, an operating table for a puncture robot of the present invention includes a column 15 and a control cabinet 3. The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More