Modularized joint of cooperative positioning arm for minimally invasive surgery robot
A modular joint and cooperative positioning technology, applied in the field of medical robots, can solve the problems of inability to collect control and safety detection data in real time, threats to the personal safety of medical staff, and inability to control the output torque and movement speed of the robotic arm. The effect of high precision, light weight and large output torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
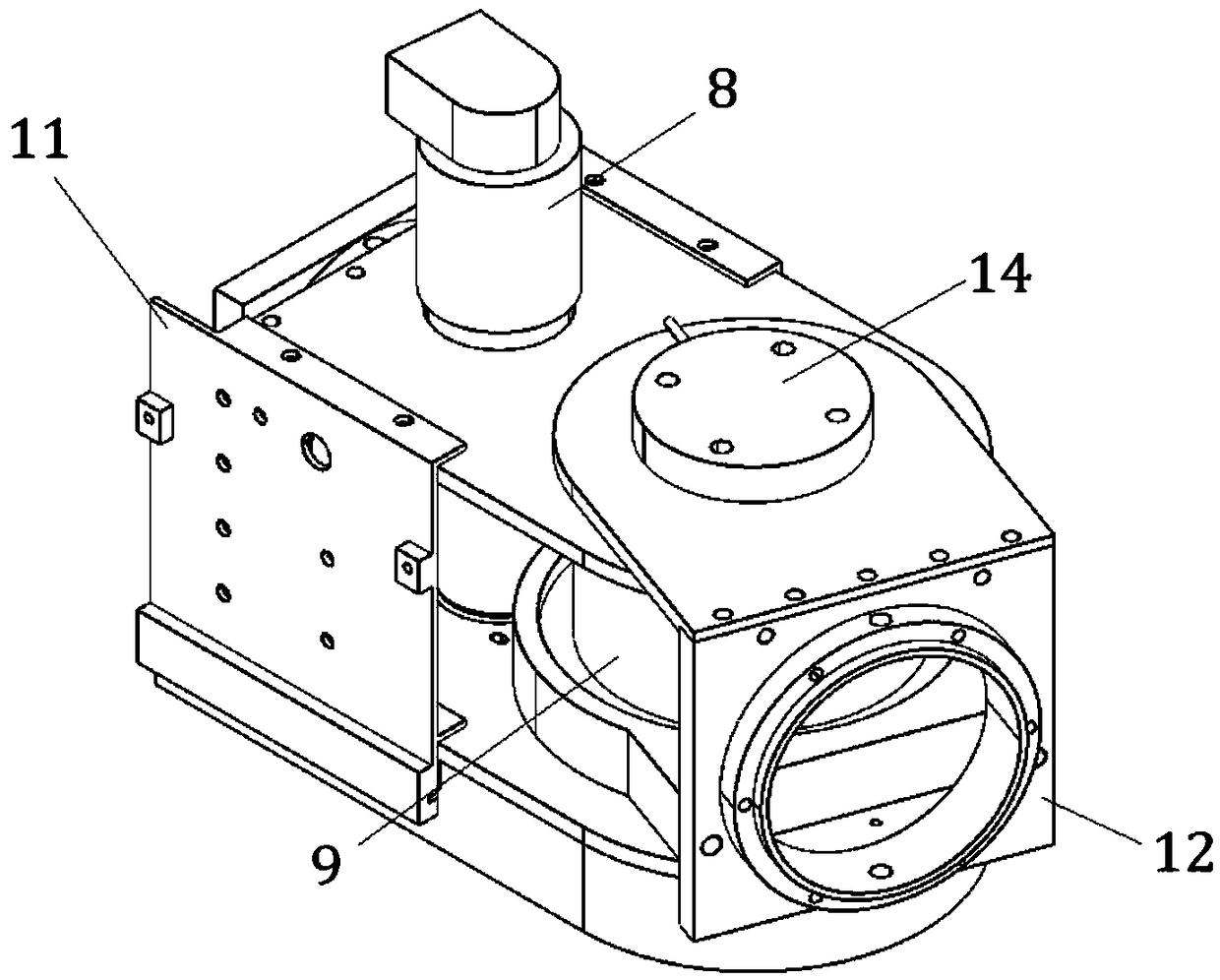
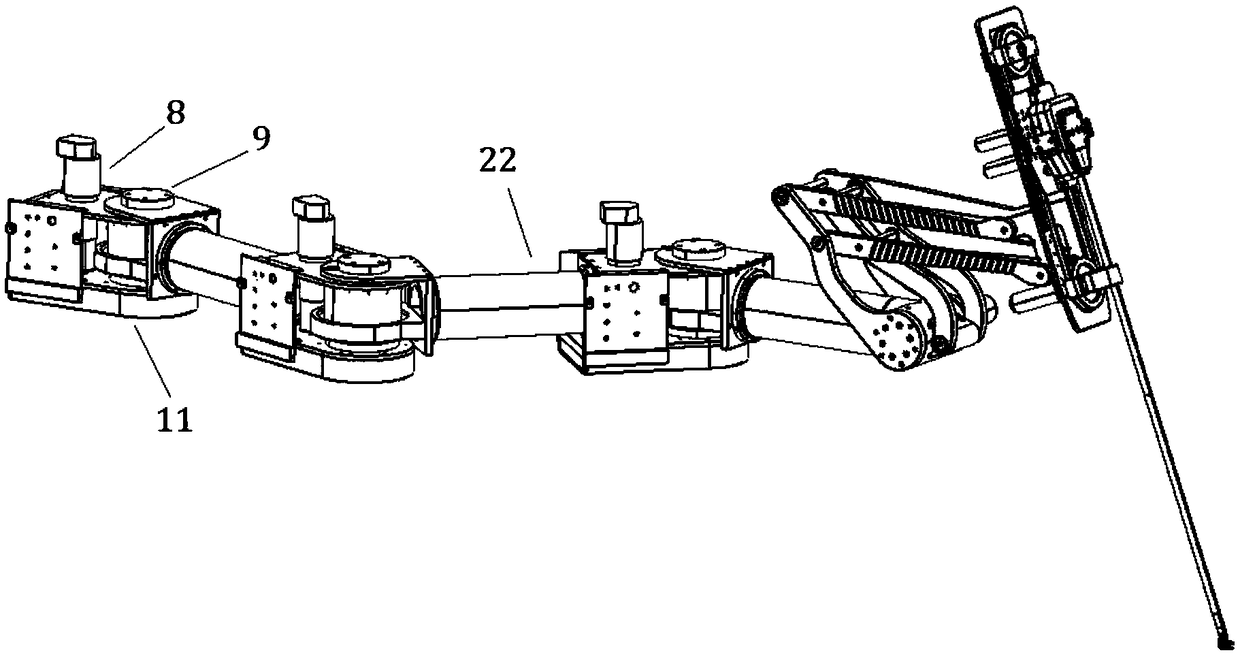
[0018] like figure 1 As shown, it is a modular joint of a cooperative positioning arm for minimally invasive surgery related to this embodiment, including: a housing 11, a driving mechanism 8 fixedly arranged in the housing 11, and an output mechanism 9 rotatably arranged in the housing , wherein: the driving mechanism 8 is connected to the output mechanism 9, the driving mechanism 8 is connected to the output mechanism 9 or the frame of other modular joints, and the output mechanism 9 is connected to the driving mechanism 8 or mechanical claws of other modular joints.
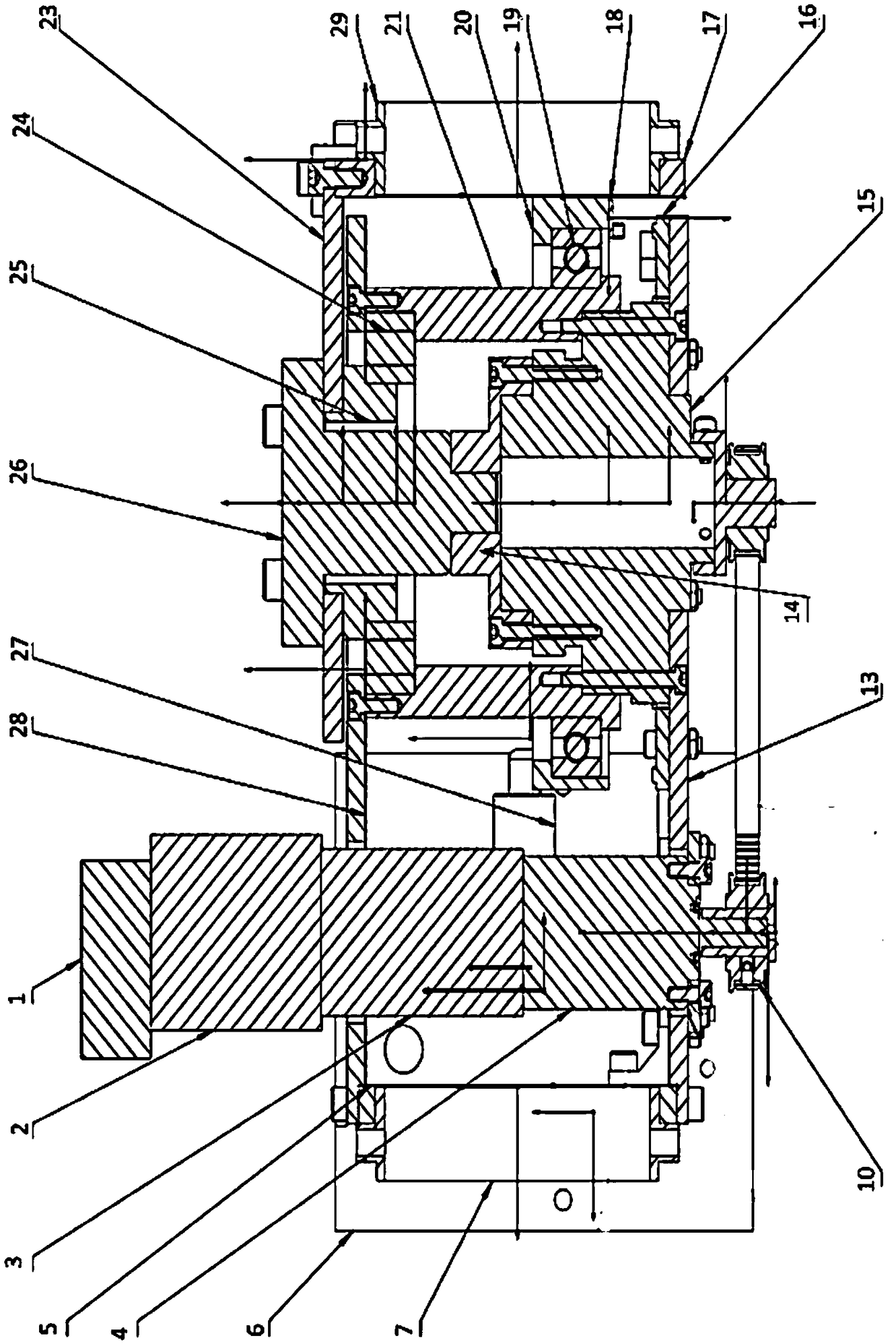
[0019] like figure 2 As shown, the drive mechanism 8 includes: a motor 3 with an encoder 1 and a brake 2, a planetary gearbox 4 connected to the output shaft of the motor, and a synchronous pulley 10 arranged on the output shaft of the planetary gearbox. Wave deceleration mechanism, wherein: the synchronous pulley 10 is connected with the output mechanism 9.
[0020] The output mechanism 9 includes: a torqu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More