Underground target recognition method based on joint inversion
A technology of target recognition and joint inversion, applied in the directions of acoustic re-radiation, electrical/magnetic exploration, geophysical measurement, etc., can solve the problems of inaccurate results, inability to converge, and very high requirements, and achieve the effect of small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
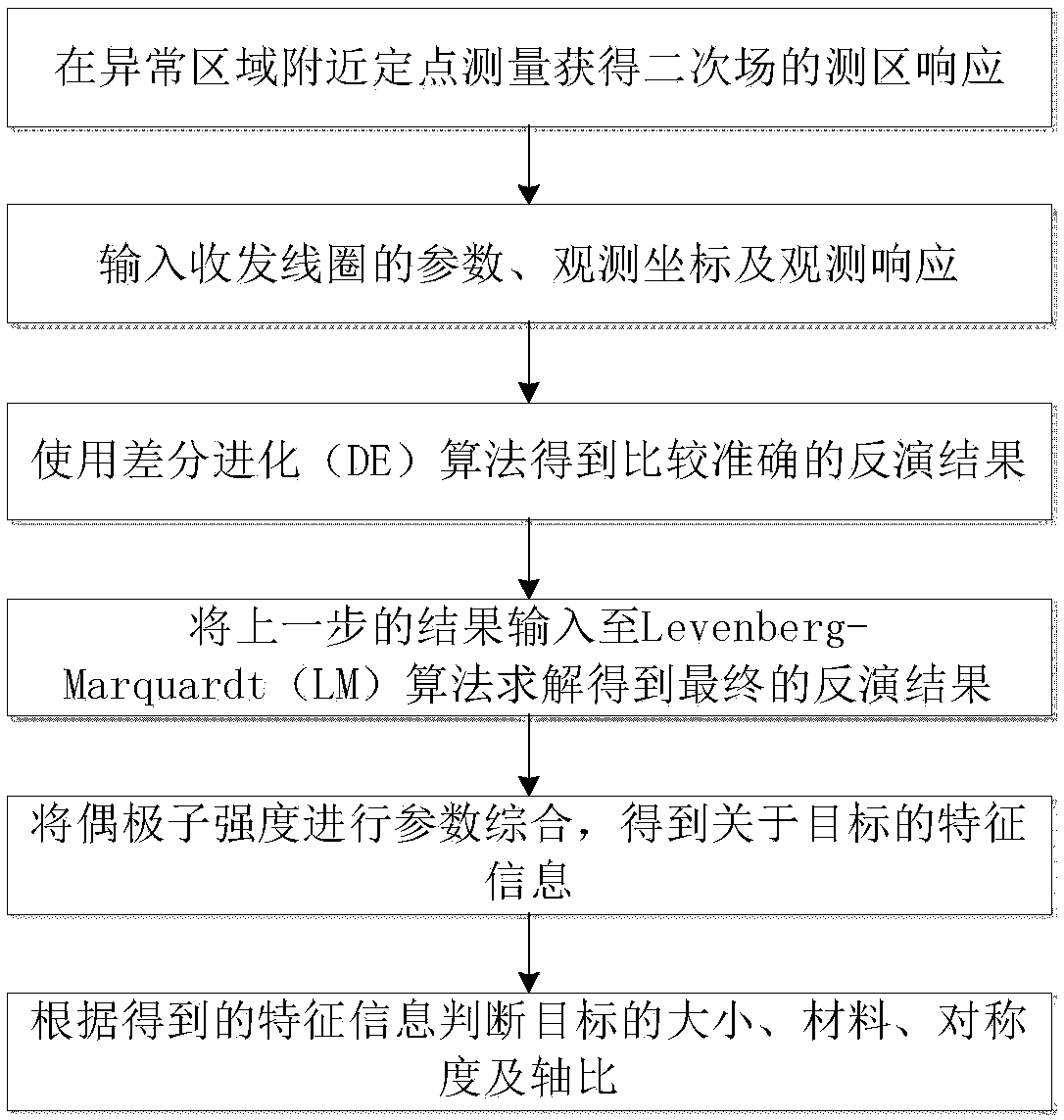
[0061] In this specific embodiment, the underground target is identified through the described method for identifying the underground target based on the joint inversion of DE-LM.
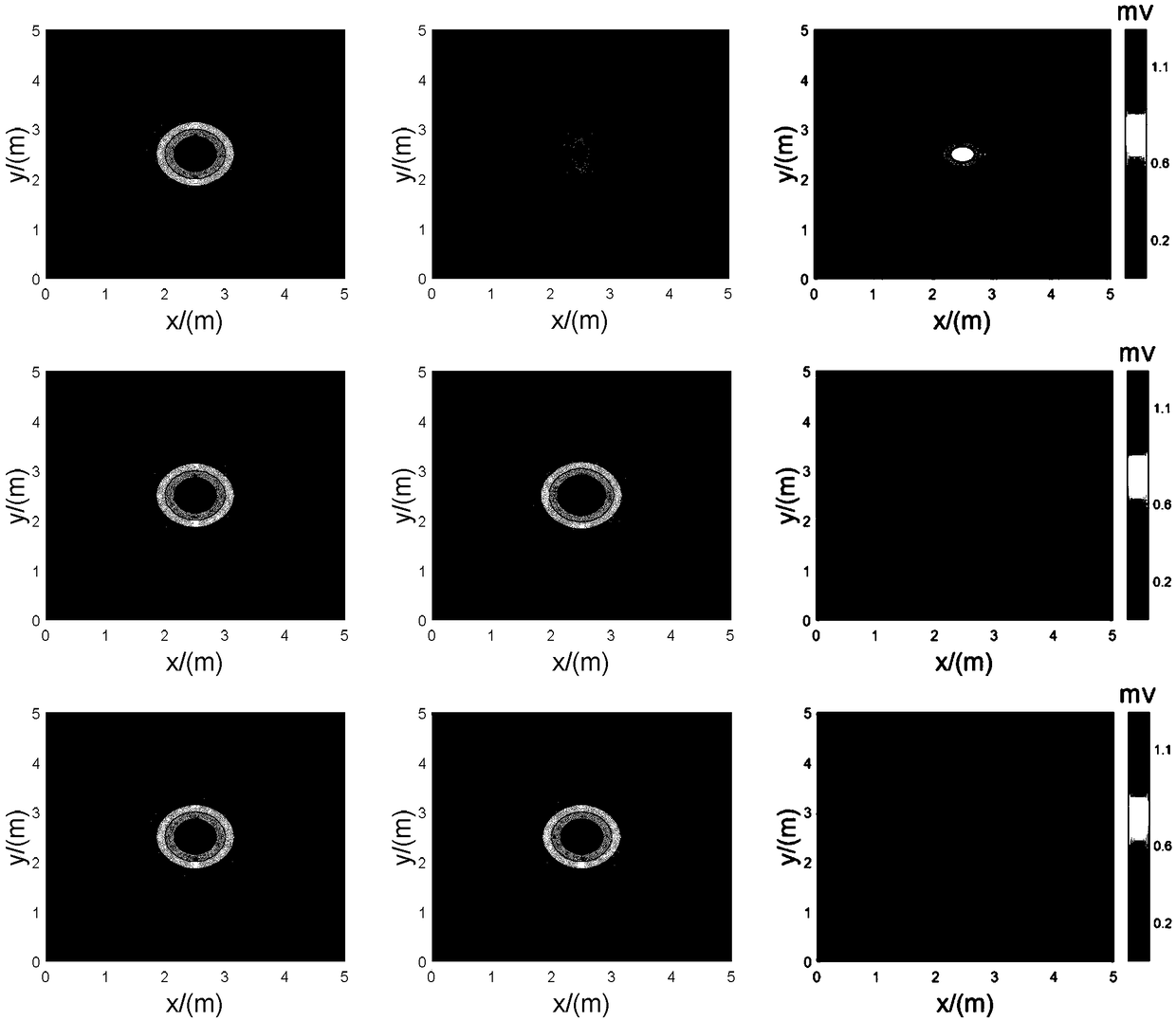
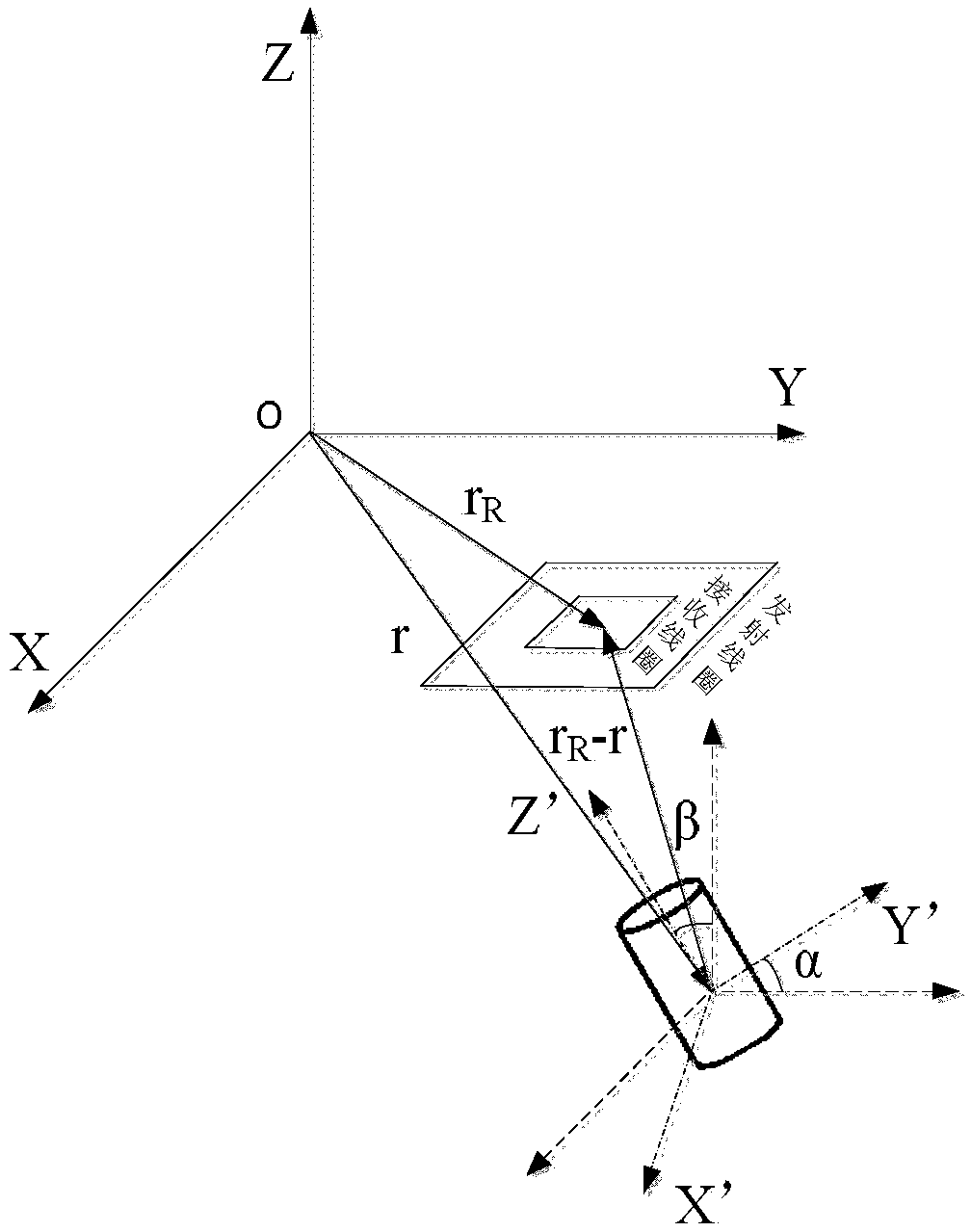
[0062] The measurement area is 5m*5m, and the observation coordinate system is established. A steel drum with a size of 20*10*10 (cm) is placed at the coordinates (2.5, 2.5, -1.5), and the α and β inclination angles are both 0°. The electromagnetic detection system measures the secondary field response of the target at a fixed point interval of 50cm, see figure 2 .
[0063] Input the parameters of the transmitting and receiving coil of the electromagnetic detection system, the square transmitting coil is 1m*1m, the transmitting current is 6A, and the square receiving coil is 0.5m*0.5m, placed concentrically and coplanarly with the transmitting coil.
[0064] When the time-domain electromagnetic method is used to invert underground targets, there are many parameters to be inverted, and the dipole ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More