

Flexible robot based on piezoelectric drive and its control method
A technology of piezoelectric drive and control method, which is applied in the field of flexible robots and can solve the problems of low strength, low load of flexible robots, and poor stiffness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
[0038] This invention may be embodied in many different forms and should not be construed as limited to the embodiments set forth herein. Rather, these embodiments are provided so that this disclosure will be thorough and complete, and will fully convey the scope of the invention to those skilled in the art. In the drawings, components are exaggerated for clarity.
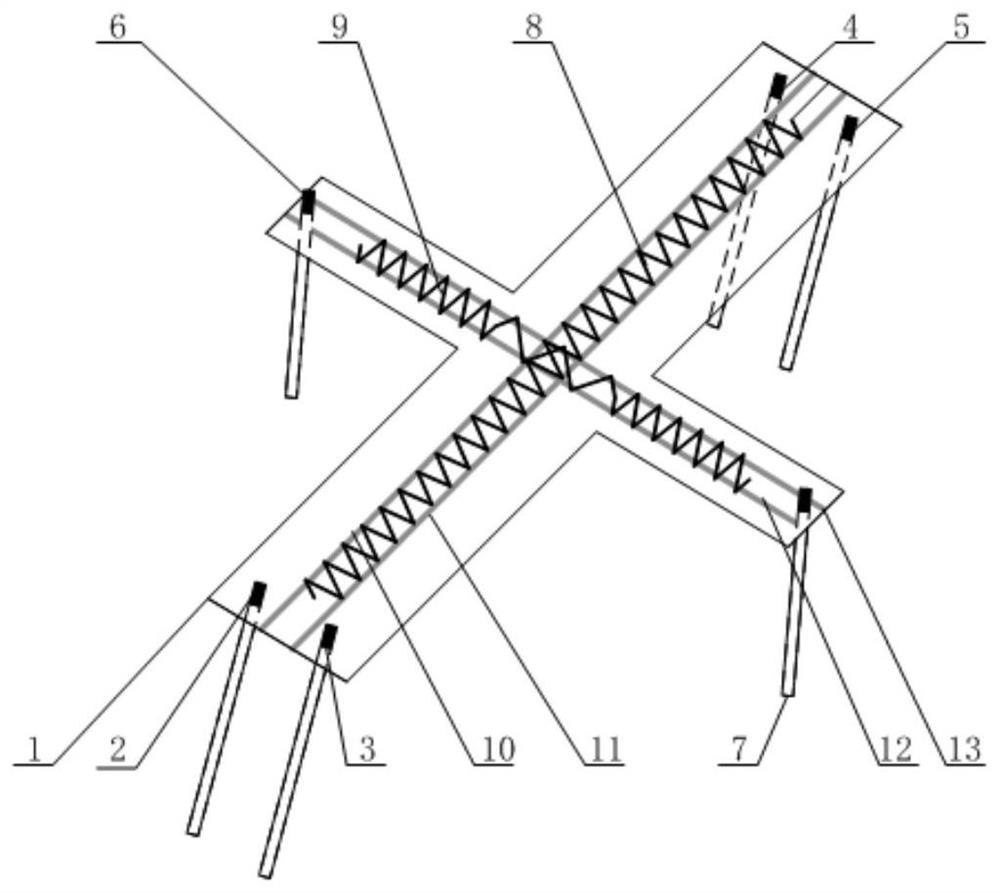
[0039] Such as figure 1As shown, the flexible robot based on piezoelectric drive of the present invention includes a PVC film 1, a first driving foot 2 installed on the PVC film 1, a second driving foot 3, a third driving foot 4, a fourth driving foot 5, a first driving foot Five driving feet 6, the sixth driving feet 7, the first driving feet 2, the second driving feet 3, the third driving feet 4, and the fourth driving feet 5 are tilted forward at the same angle relative to the PVC ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More