

Robot 3D vision hand-eye calibration method
A hand-eye calibration and robot technology, which is applied in the field of robot 3D vision hand-eye calibration, can solve the problems that the accuracy is difficult to meet the requirements, the accuracy is not enough, and the physical accuracy requirements are very high, and the effect of meeting the accuracy requirements and improving the accuracy is achieved.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to describe the present invention more specifically, the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
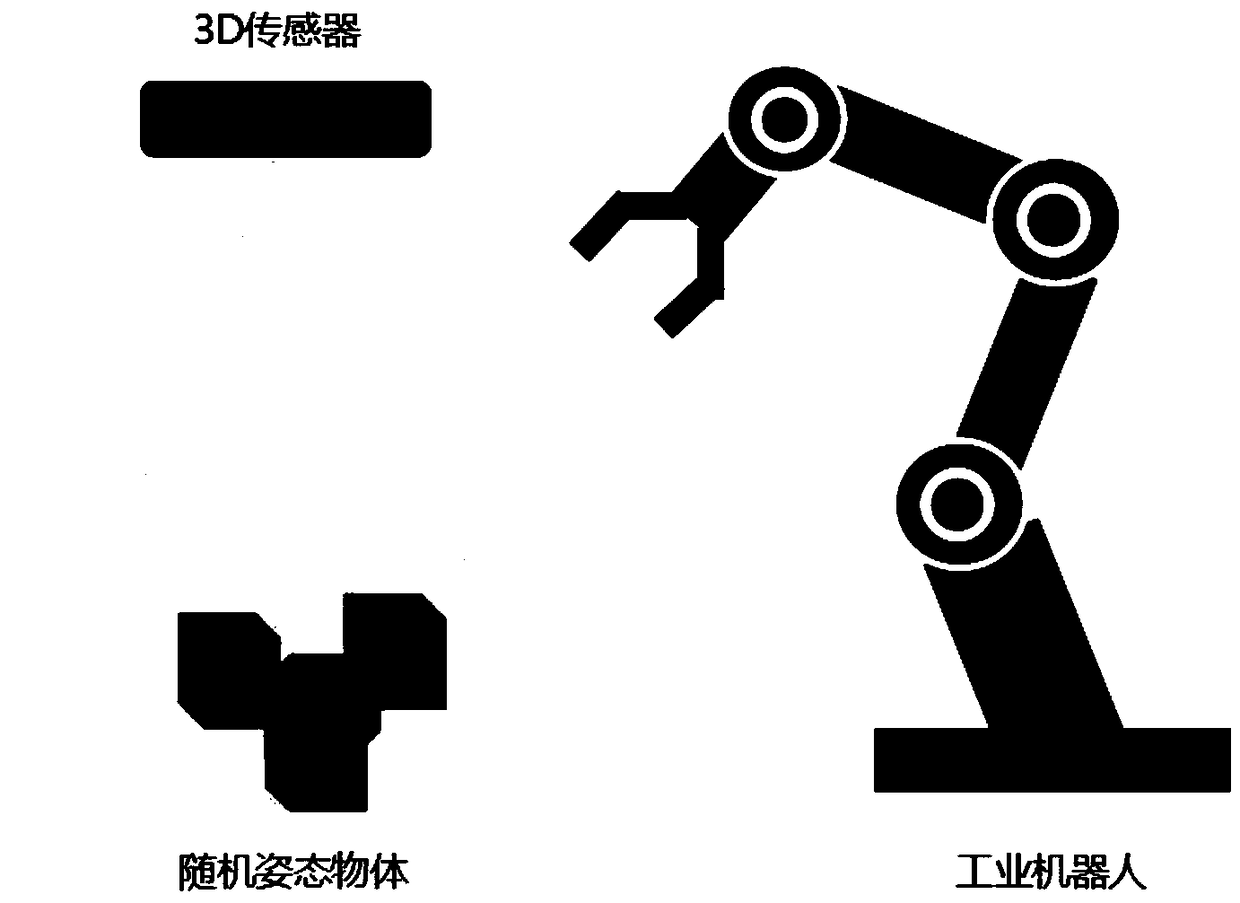
[0034] Such as figure 1 As shown, in this embodiment, a 3D structured light sensor and a six-degree-of-freedom industrial robot are taken as examples to illustrate the robot 3D vision hand-eye calibration method and based on the hand-eye calibration method, the position and posture of the workpiece under the 3D sensor are converted into the base coordinates of the robot. The specific realization of the position and attitude of the system.
[0035] The steps of the robot 3D vision hand-eye calibration method in this embodiment are as follows:
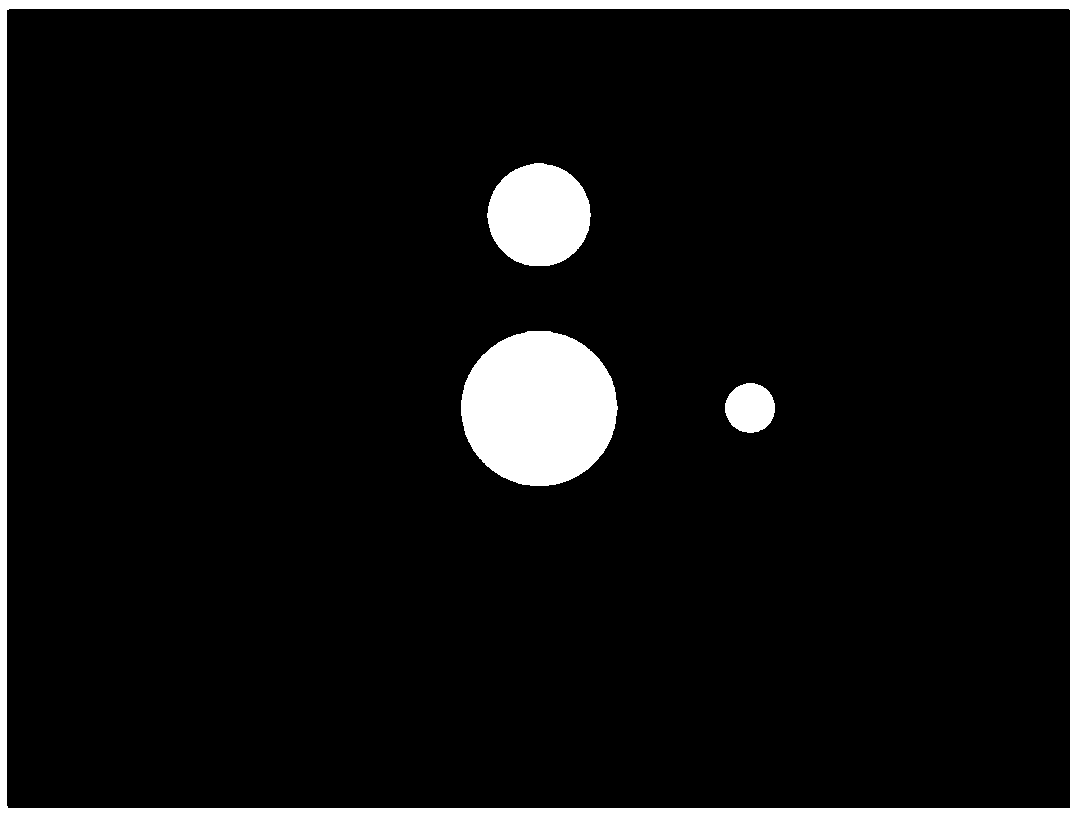
[0036] Step S1: set as figure 2 The shown calibration plate is installed on the robot flange, move the end of the robot actuator, change the position and attitude of the flange, and obtain the attitude of multipl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More