Transformation submersible based on buoyancy drive and non-axial vector propelling and working method of transformation submersible
A vector propulsion and buoyancy-driven technology, which is applied in ship propulsion, propulsion components, underwater operation equipment, etc., can solve problems such as the inability to reduce energy consumption and reduce the operating resistance of underwater submersibles, and achieve a single movement posture and reduce Energy consumption, the effect of improving sports performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
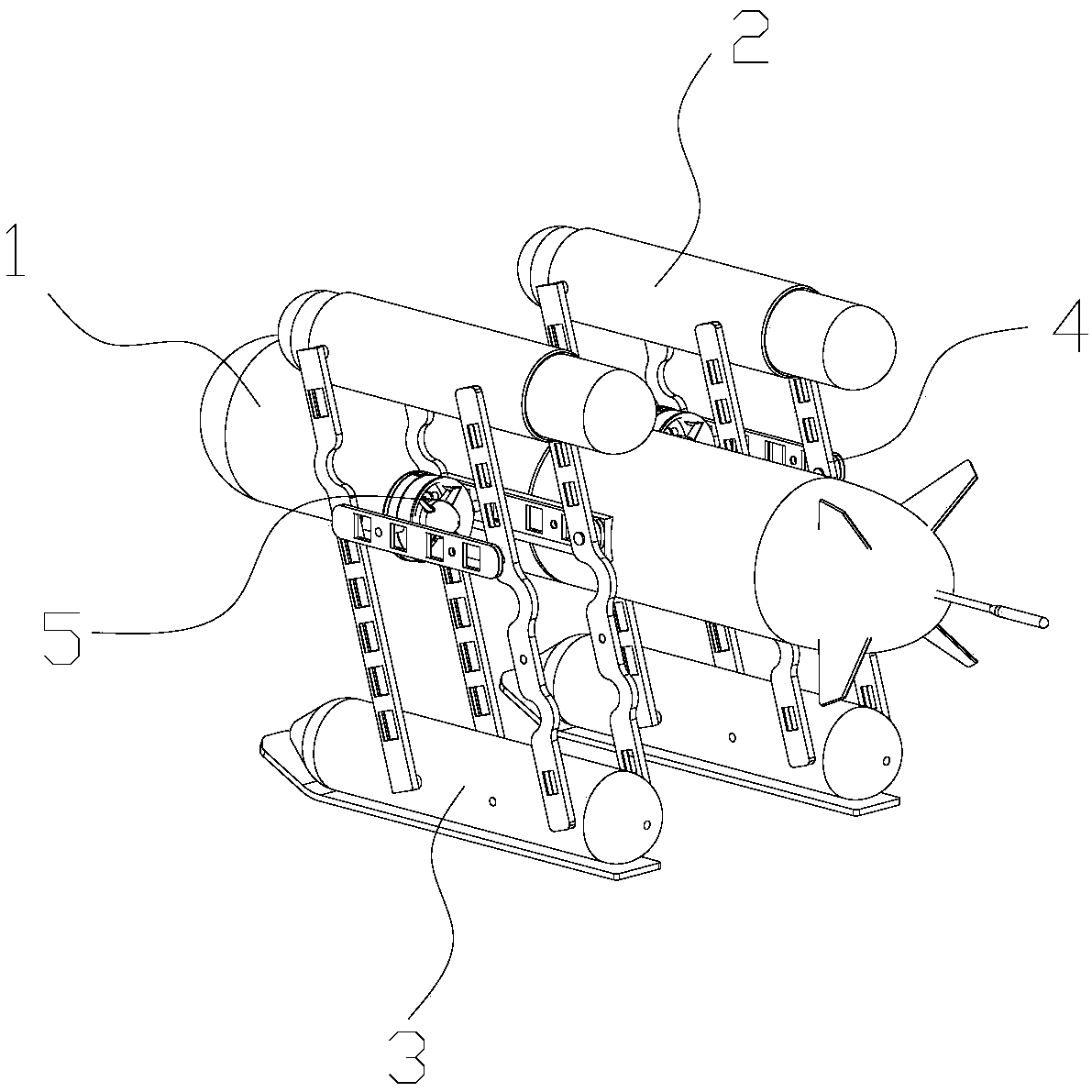
[0078] Such as Figure 3-7 As shown, a highly efficient deformable submersible based on buoyancy drive and shaftless vector propulsion includes a main cabin 1 , a buoyancy cabin 2 , a battery cabin 3 , a deformation mechanism 4 and a shaftless vector thruster 5 .
[0079] Wherein, the main cabin 1 includes a main cabin body 11 , a front wind deflector 12 , a rear wind deflector 13 , a communication antenna 14 , a control mechanism 15 and a camera mechanism 16 .
[0080] There is one set of the main cabin 1, which is the core control and driving part of the high-efficiency deformation submersible based on buoyancy drive and shaftless vector propulsion, and its main function is to realize the drive of other sub-mechanisms or sub-devices. Wherein the main cabin body 11 is cylindrical, and the driving mechanism etc. of control mechanism 15 and camera mechanism 16 and other parts are placed inside, the front and back of main cabin body 11 has end cover device, and horizontal and ra...
Embodiment 2
[0095] On the basis of the above-mentioned embodiments, the present invention also mentions a kind of high-efficiency deformation submersible control and working method based on buoyancy drive and shaftless vector propulsion, the specific process is as follows:
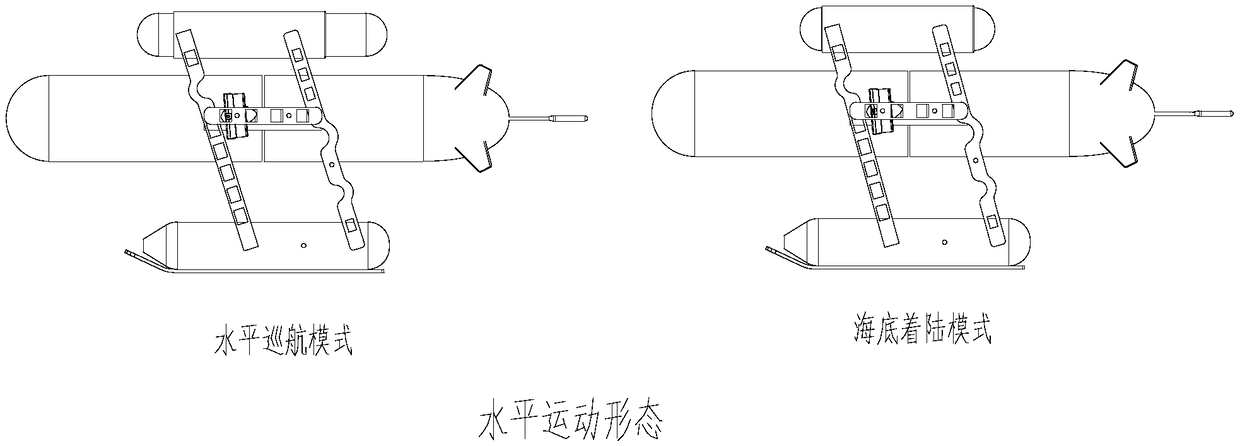
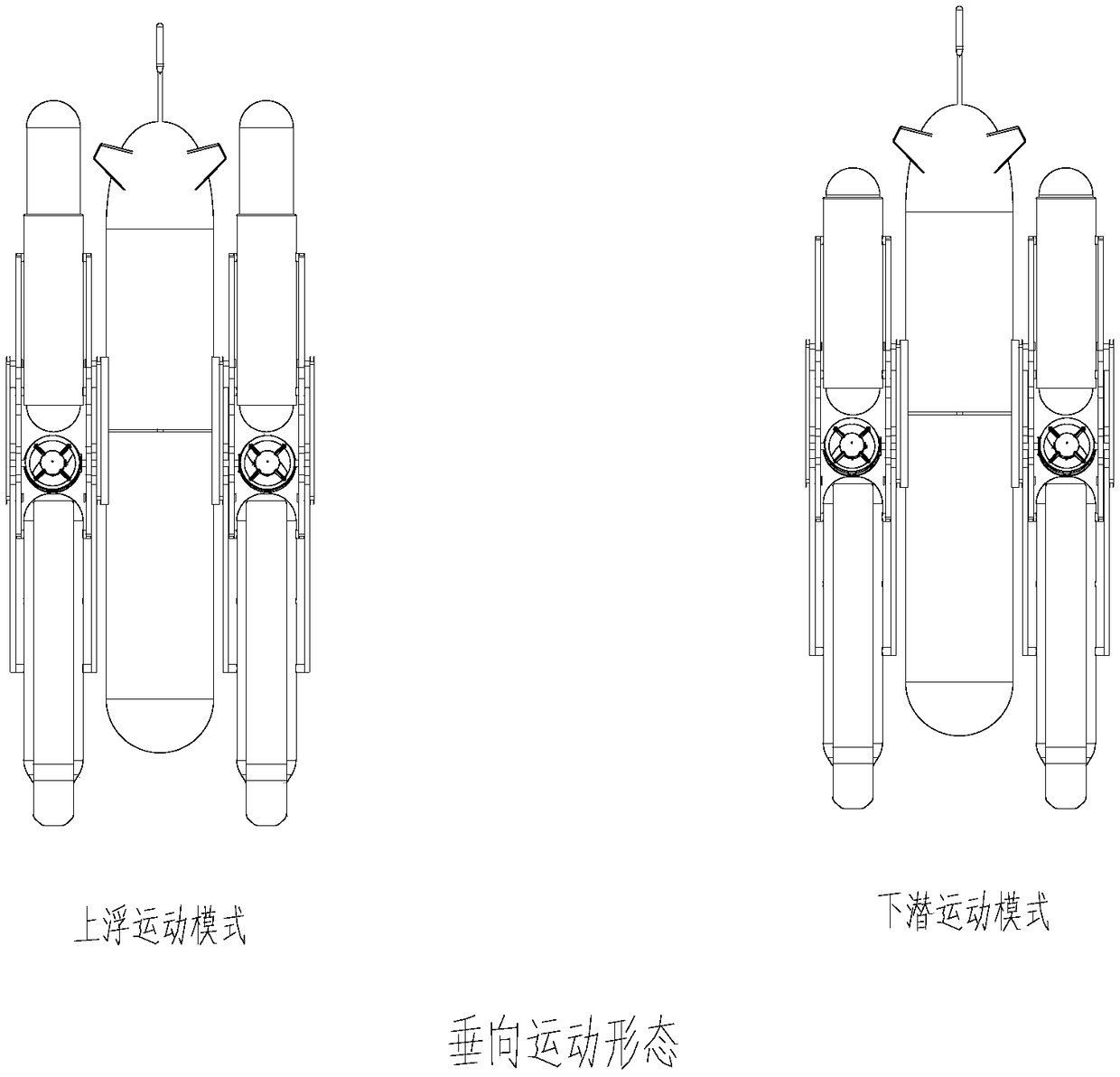
[0096] There are two main working states of the deformable submersible: vertical movement form (I) and horizontal movement form (II). 2 and the transformation of the positions of the buoyancy chamber 2 and the battery chamber 3 in cooperation with the deformation structure of the deformation mechanism 4 to change the positions of the center of buoyancy and the center of gravity.
[0097] Among them, the vertical motion form (Ⅰ) includes: floating motion (i) and diving motion (ii), and its state is determined by the volume of the rolling diaphragm in the buoyancy chamber 2. After the buoyancy chamber 2 is finally adjusted, if When the overall buoyancy of the deformable submersible is greater than the gravity, the defor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com