

Online calibration method of star sensor assisted gyroscope for ships
A technology of star sensor and calibration method, which is applied in the direction of instruments, measuring devices, surveying and mapping, and navigation, etc., and can solve problems such as unknown statistical characteristics and divergence of measurement noise of gyroscopes and star sensors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0106] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
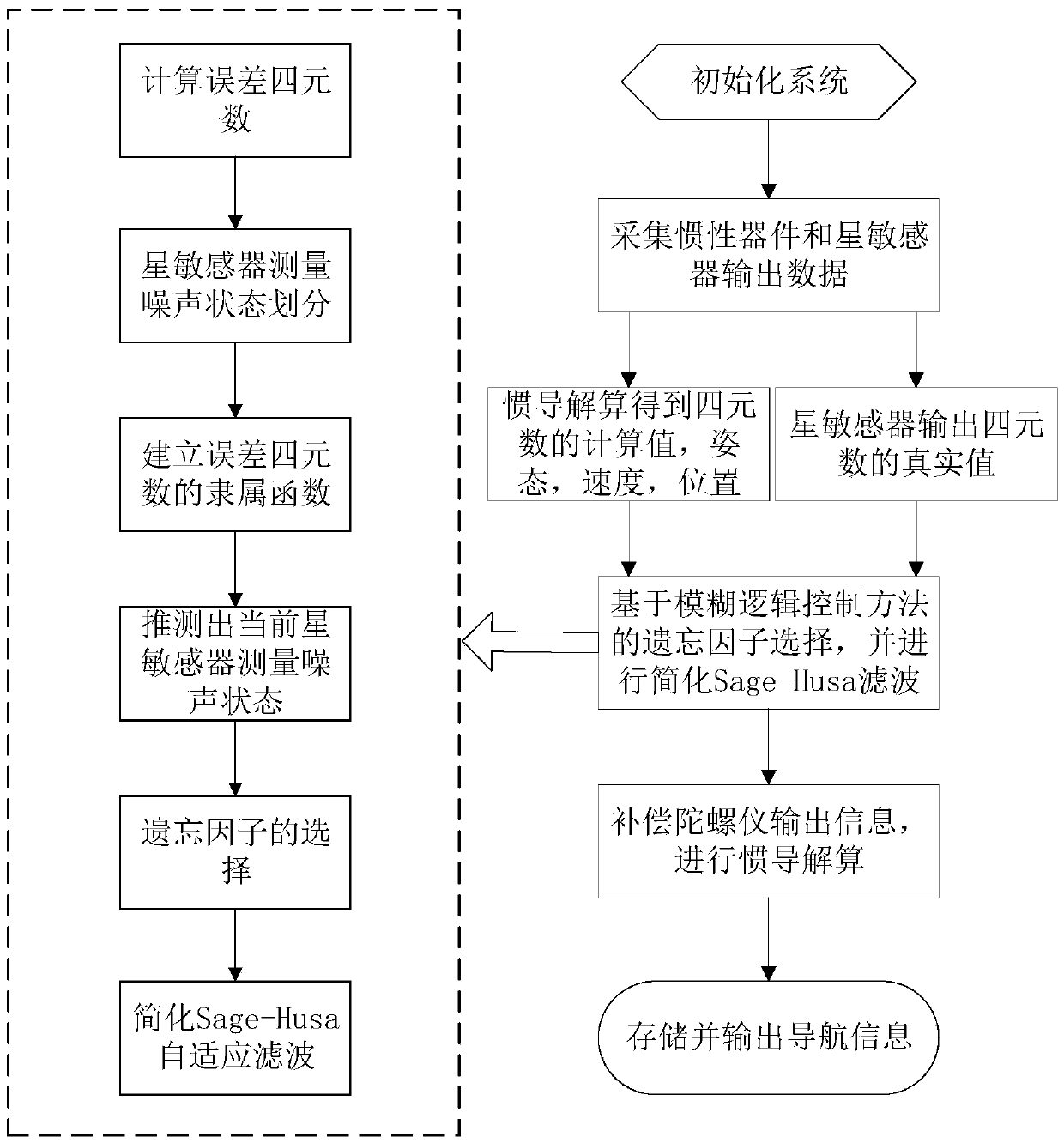
[0107] The present invention is an on-line calibration method for marine star sensor assisted gyroscope based on adaptive selection of Sage-Husa filter based on forgetting factor, and the process of the method is as follows: figure 1 shown, including the following steps:
[0108] Step 1: Turn on the power and initialize the star sensor / inertial integrated navigation system. At the initial moment of navigation, the system needs to be initialized:
[0109] (1) Initialization of navigation information: ship position information lambda s0 , the unit is radian, expressed in rad, the velocity information v x0 , v y0 , the unit is m / s, expressed in m / s, and the attitude angle information φ x0 , φ y0 , φ z0 , the unit is radian, expressed in rad, the initial transformation matrix initial quaternion q 0 ;
[0110] (2) Initialize constant value par...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More