

Method and device for constructing high-precision map
A high-precision, map technology, used in maps/plans/charts, instruments, educational appliances, etc., can solve problems such as high prices, high equipment cost and skill level requirements, and increased system and production process complexity. The effect of reducing storage and transmission pressure, eliminating skill level dependencies, and improving update efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] An example of a method and an apparatus for constructing a high-precision map according to an embodiment of the present disclosure will be described below with reference to the accompanying drawings.
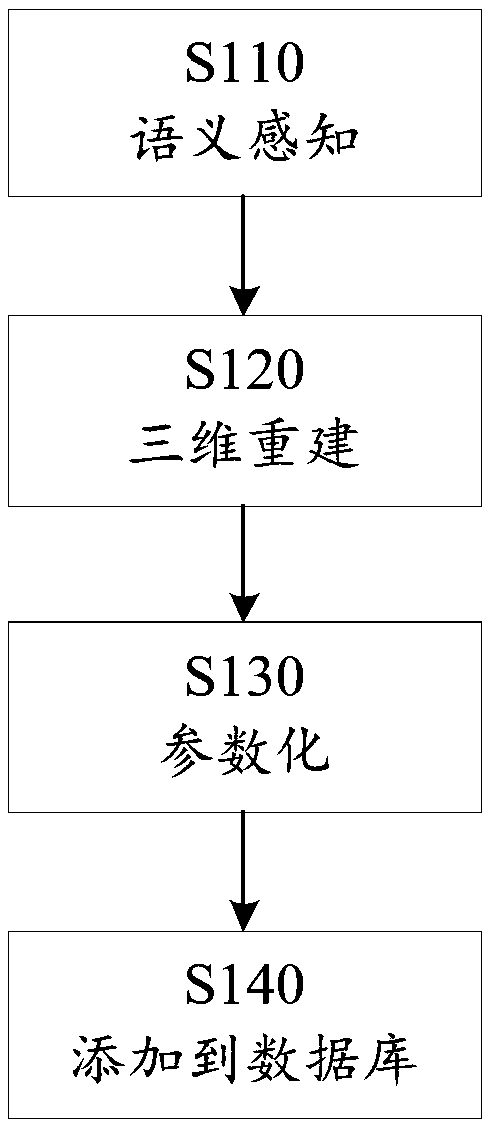
[0018] Such as figure 1 As shown, the method according to the embodiment of the present disclosure may start at step S110 to perform semantic perception on one or more images from the on-board camera of the vehicle based on a deep learning algorithm.
[0019] In one embodiment, one or more appropriate deep learning algorithms or models can be used to determine the category of the map element to which each pixel in each image belongs, to detect the boundaries of landmarks of interest in each image, and to determine the category of the landmark, and determine the correlation between the two consecutive images of the landmark of interest, thereby performing the semantic perception in step S110.
[0020] The present disclosure is not limited to any particular deep learning a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More