

Automated training assisting device for training non-human primate animal to control mechanical arm to conduct stretching and grabbing
A technology for primates and auxiliary devices, applied in animal taming devices, applications, animal husbandry, etc., can solve the problems of poor training effect, high mental and physical consumption, and difficult manual completion, so as to reduce the difficulty of learning and training , high degree of automation, and the effect of ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
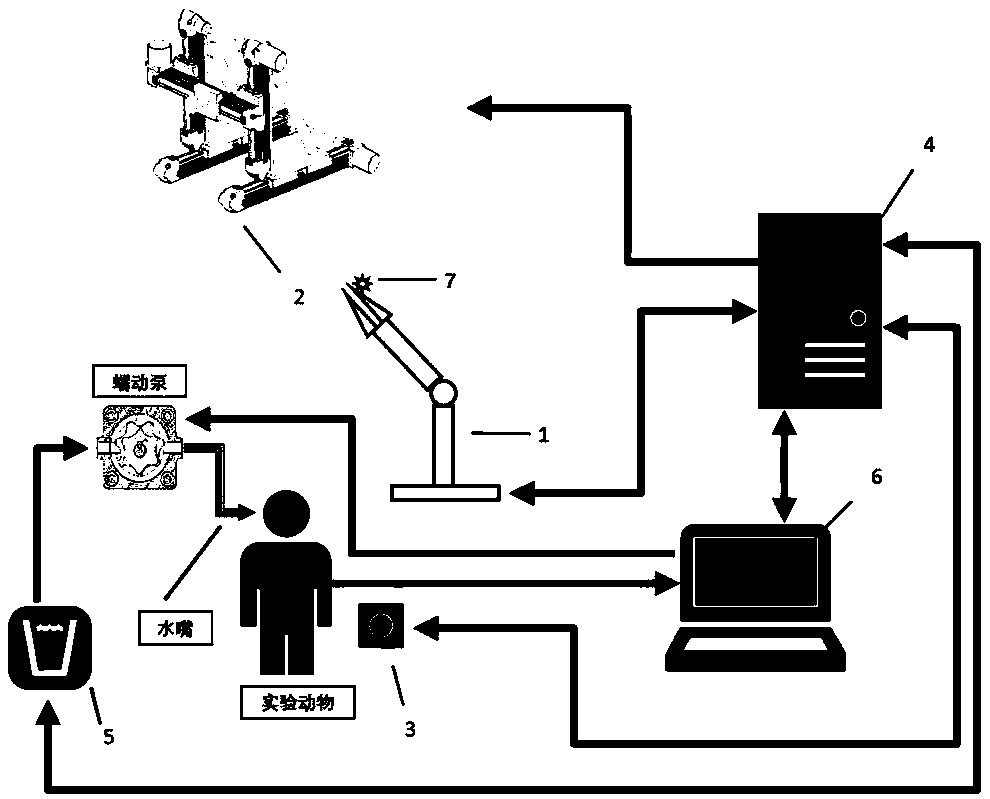
[0028] see figure 1 , an automated assistive device for training nonhuman primates to control robotic arm extension and grasping. The device mainly includes a mechanical arm 1, a three-dimensional storage platform 2, an animal control device 3, a microcontroller 4, a water supply control system 5 and a PC 6, and the microcontroller 4 is connected with the mechanical arm 1, the three-dimensional storage platform 2, and the animal control device respectively. 3. Water supply control system 5, PC 6 connection. An LED indicator light 7 is installed at the finger end of the mechanical arm 1 .
[0029] Described mechanical arm 1 is the mechanical arm of 12 degrees of freedom, and LED indicator light 7 is installed on finger end, is controlled by micro-controller 4, and micro-controller 4 is directly connected with PC machine 6, and the motion situation of mechanical arm 1 can be controlled by Configuration is carried out on the PC machine 6 according to the experimental requiremen...
Embodiment 2
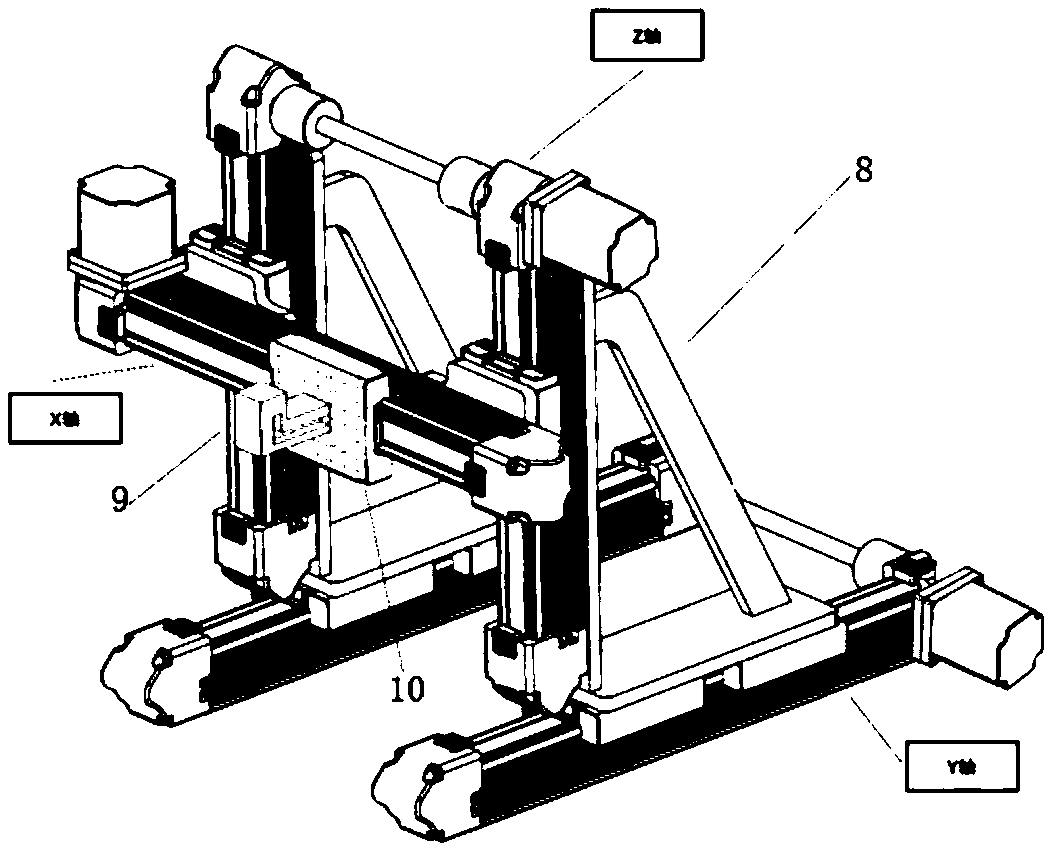
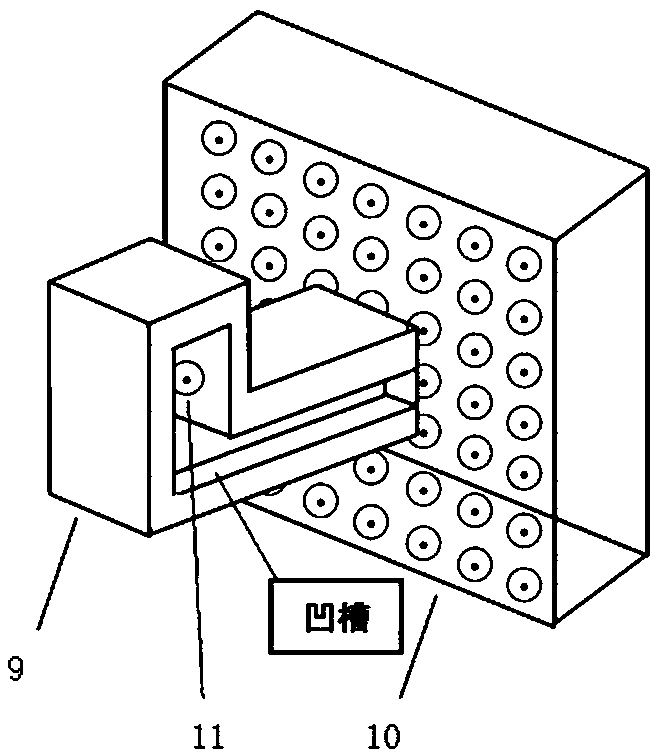
[0037] see Figure 5 , is the experimental flow chart of the button stretching and grasping paradigm. The workflow of the device of the present invention is introduced below in conjunction with the experimental paradigm: under the experimental paradigm, the mechanical arm 1 is in an automatic control motion state, and the experimental animals mainly learn and train through passive observation. . After the experiment starts, the corresponding mode and parameters are first set by the PC 6, the microcontroller 4 first sends the coordinates to the three-dimensional object storage platform 2, the three-dimensional motion subsystem 8 drives the grasped object 9 to move to the set position, and the LED matrix 10 according to The set recognition range lights up, and then the microcontroller 4 sends a green light flashing command to the LED indicator 11, prompting the experimental animal to start the experiment, and at the same time sends a movement command to the mechanical arm 1, and...
Embodiment 3
[0039] see Figure 6, is the experimental flow chart of the rocker stretching and grasping paradigm, and the rocking lever stretching and grasping paradigm training method of the device of the present invention is introduced below in conjunction with the experimental paradigm: Controlled learning and training. After the experiment starts, the corresponding mode and parameters are first set by the PC 6, the microcontroller 4 first sends the coordinates to the three-dimensional object storage platform 2, the three-dimensional motion subsystem 8 drives the grasped object 9 to move to the set position, and the LED matrix 10 according to The set recognition range lights up, and then the microcontroller 4 sends a green light flashing command to the LED indicator 11, prompting the experimental animal to start this experiment, and at the same time, the microcontroller 4 starts to receive the voltage signal output by the rocker, and controls the signal according to different voltage va...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More