

Target tracking cooperative control system and method based on multiple unmanned surface vehicles
A technology of cooperative control and target tracking, applied in control/adjustment system, two-dimensional position/course control, non-electric variable control, etc., can solve the problem of the gap between theory and practice, to improve tracking ability and reduce calculation The effect of quantity, high reliability and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
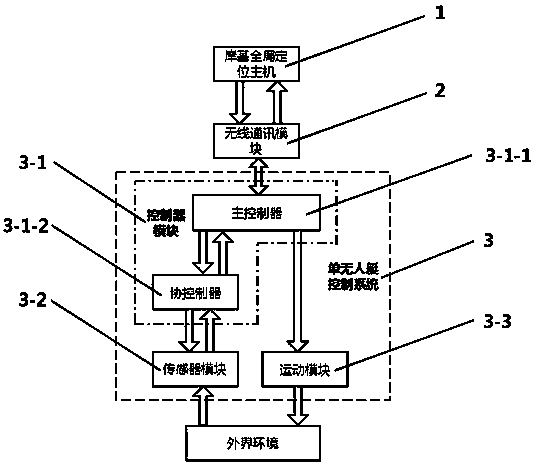
[0052] like figure 1As shown: This target tracking cooperative control system based on multiple unmanned boats is composed of a shore-based global positioning host (1) connected to a single unmanned boat control system (3) through a wireless communication module (2). The shore-based global positioning The host computer (1) is used as the upper computer to process the data collected by the sensor system mounted on each unmanned boat, and obtain the target and the pose information of each unmanned boat; the wireless communication module (2) is mainly responsible for the The perception information is uploaded to the shore-based global positioning host (1), and at the same time, the pose information can be transmitted to the bottom of each unmanned boat;
[0053] The single unmanned boat control system (3) includes a controller module (3-1), a sensor module (3-2) and a motion module (3-3), and the controller module (3-1) controls the unmanned boat The decision-making center of th...
Embodiment 2
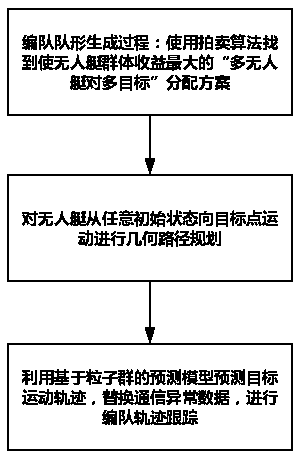
[0055] like figure 2 As shown, this target tracking cooperative control method based on multi-unmanned vehicles uses the above-mentioned system to operate, and the operation steps are as follows:
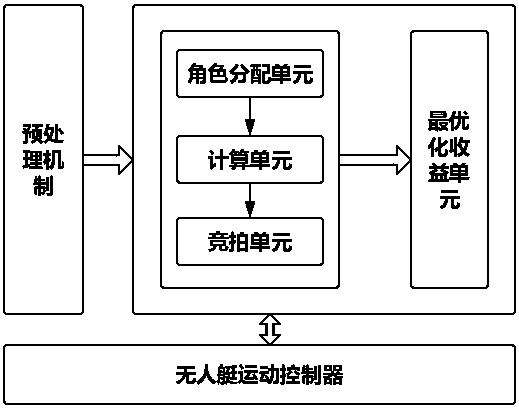
[0056] Step 1: If image 3 , in the formation formation process, for the target matching problem between multiple unmanned vehicles and multiple targets, the auction-based allocation algorithm is used to construct a multi-stage task allocation bidding subsystem, and the allocation scheme that maximizes the benefits of the unmanned vehicle group is found:
[0057] 1.1 Preprocess the unmanned vehicles and targets in the area: delineate the unmanned vehicles and target tasks that meet the threshold conditions as a bidding sub-area;
[0058] 1.2 Multiple rounds of bidding for each bidding sub-area:
[0059] (1.2-1) Initialize n=1. Let M be the size of the unmanned boat set, and N be the set size of the target task;
[0060] (1.2-2) let i=n;
[0061] (1.2-3) For the target task c, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More