

Predicted value based measurement conversion and sequential filtering maneuvering target tracking method
A technology of maneuvering target tracking and sequential filtering, which is applied in the field of Doppler radar tracking and radar target tracking, and can solve problems such as the inability to describe the state of target motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
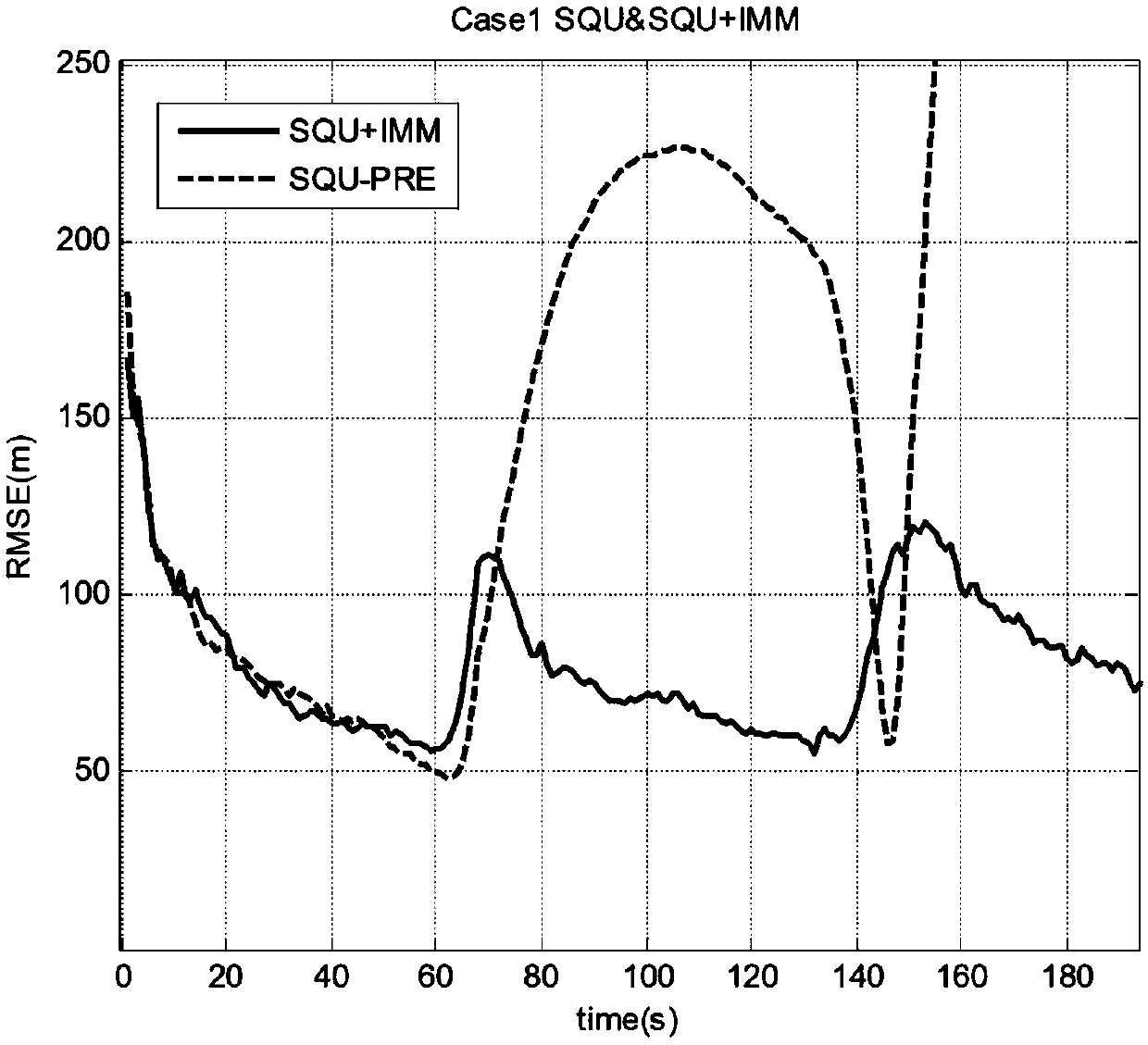
[0120] In this implementation plan, it is considered to track a certain moving target in a maneuvering scene in a two-dimensional plane. The initial position of the target is (x=5000m, y=1000m), and the initial velocity is (v x =25m / s,v y =2m / s). The target moves at a constant speed from 0 to 60s, and moves at a uniform acceleration from 60s to 85s, with an acceleration of (-2m / s 2 ,2m / s 2 ), 85s~135s for uniform motion, 135s~150s for uniform acceleration, the acceleration is (3m / s 2 ,-0.5m / s 2 ), 150s ~ 200s to do uniform motion. The correlation coefficient between radial velocity and distance is 0.5. Take different values for distance, azimuth, and standard deviation of Doppler measurement noise, and make the following scene settings:
[0121] Scenario 1: The distance measurement error of the sensor is The measurement error of the azimuth angle is degree, the measurement error of Doppler radial velocity is 0.1m / s;
[0122] Scenario 2: The distance measurement er...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More