

Control method of swarm drone
A control method and UAV technology, applied in wireless communication, network traffic/resource management, power management, etc., can solve the problem of short task execution period, fast change of link quality, and inability to meet "swarm" UAV control and other problems, to achieve the effect of good practicability, low bandwidth occupation, and low energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
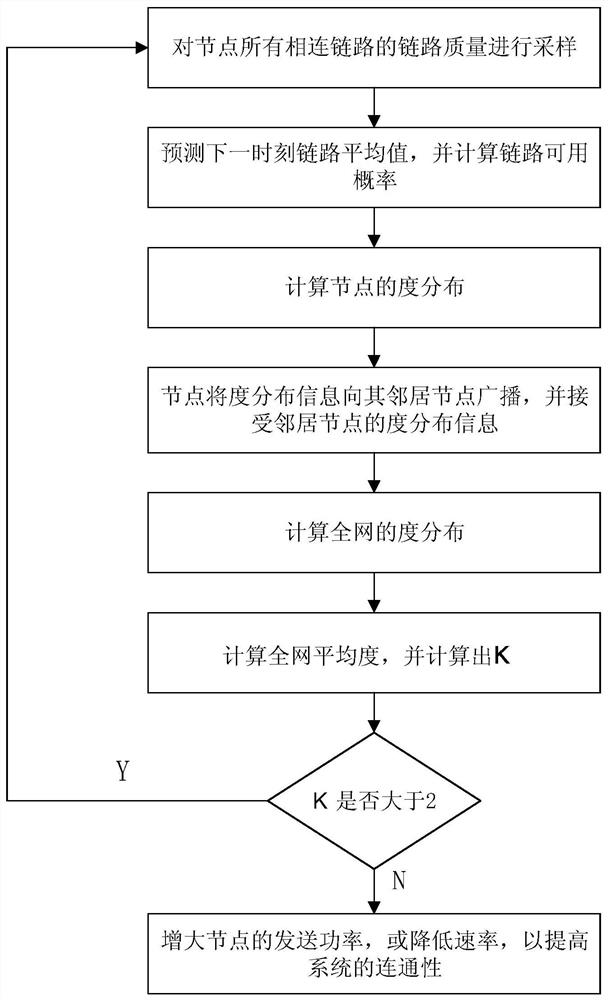
[0044] refer to figure 1 . The concrete steps of the control method of the swarm unmanned aerial vehicle of the present invention are as follows:
[0045] Step 1: Sampling the link quality of all connected links of the node, and obtaining the link evaluation value L of the t-th measurement ij (t). Among them, i represents node i, and j represents the neighbors of node i.
[0046] Step 2. According to the evaluation value of each link from t-4 to t times, use the gray prediction method to predict Specific steps are as follows:
[0047] 1. Introduce the second-order weakening buffer operator (AWBO) to reduce the randomness of U(k),
[0048]
[0049]
[0050] Among them, n represents the total number of sampling samples, k represents the kth sampling; d represents the buffer operator, d 2 Indicates the second-order buffer operator;
[0051] According to the invariant theorem in gray prediction:
[0052] L (0) (k)=L(k)d 2 = L(k) (3)
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More