

Intensive learning based urban intersection passing method for driverless vehicle
An unmanned vehicle and reinforcement learning technology, applied in the field of unmanned vehicle urban intersection traffic based on reinforcement learning, can solve problems such as safety and efficiency, uncomfortable driving experience, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
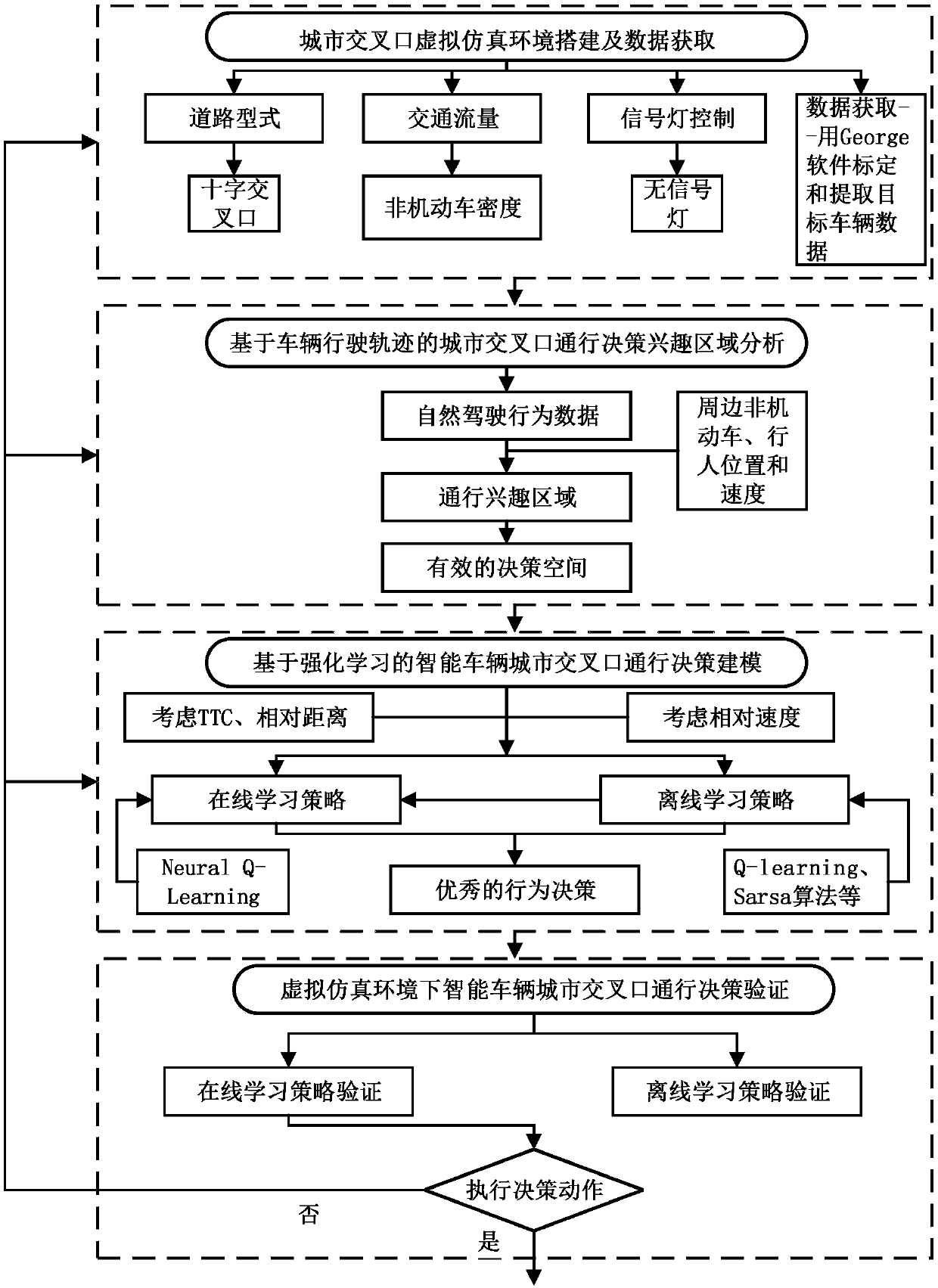
[0072] 1.1. Scene construction Prescan simulation scene construction
[0073] The construction of the virtual scene is completed in the GUI module, which includes the road and infrastructure part, the traffic participant part, the sensor module, the weather setting and the light source setting. In the road database, you can set straight roads, arc (or multiple bends) roads, intersections, Y-shaped (or T-shaped) roads, and roundabout roads, etc., and you can also set various marking lines, such as zebra crossings, straight and left-turn markings, speed limit and height limit signs, road signs, etc.; the infrastructure database can set the surrounding environment required for simulation, including different types of trees, vegetation, roadside buildings and traffic lights; traffic participant database Different types of vehicles can be set, such as trucks, cars, e-bike and other vehicle models, and different types of pedestrians can be set, including adults, elderly and children...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More