

High-speed carrying robot
A handling robot, high-speed technology, applied in conveyors, conveyor objects, transportation and packaging, etc., can solve the problems that the production efficiency of robot automation lines cannot meet high-efficiency production, restrict the overall production rhythm of stamping automation lines, etc., and achieve smooth reciprocating swing. , The effect of smooth conveying and smooth operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the embodiments of the present invention. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
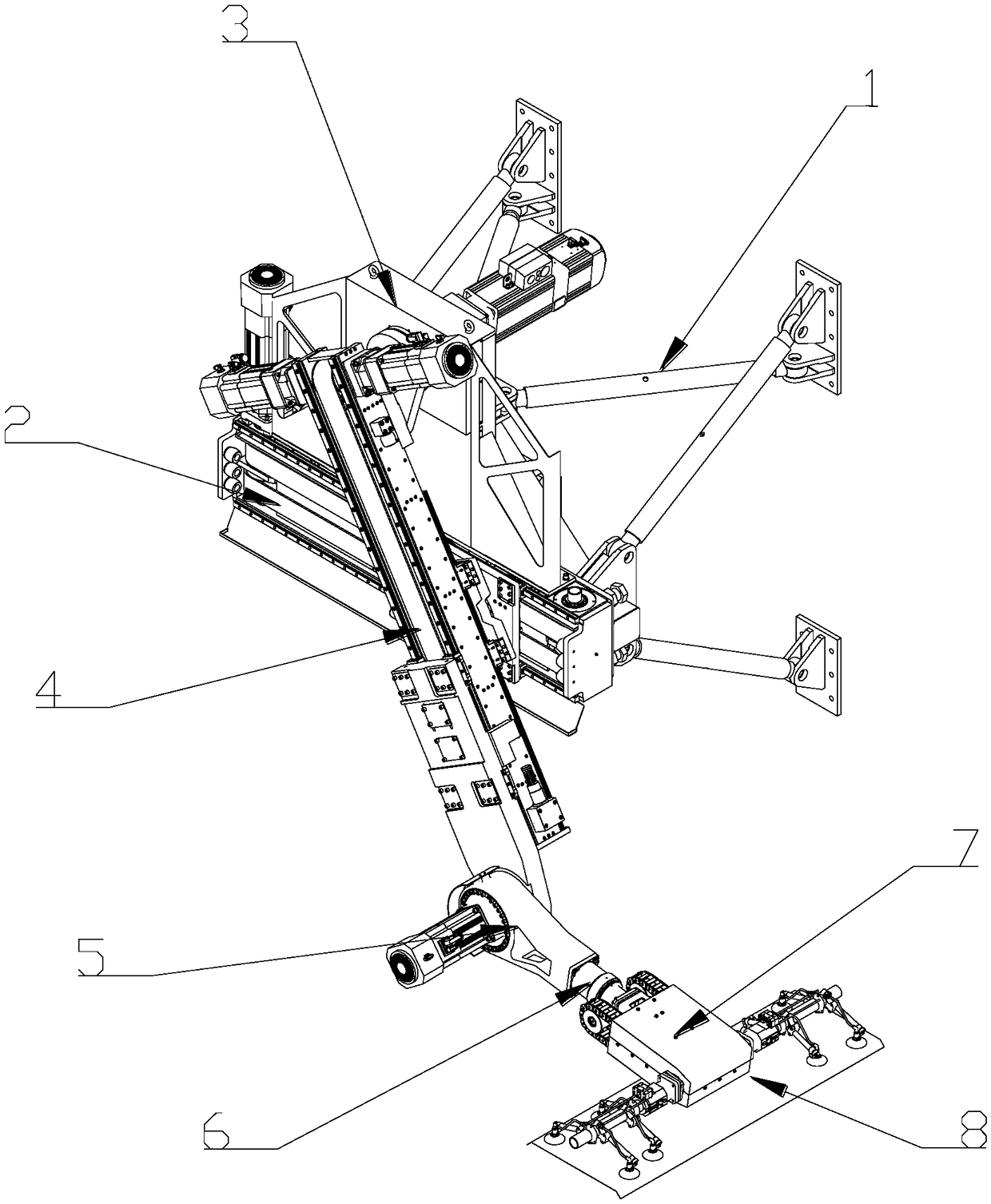
[0028] A high-speed handling robot, such as figure 1 As shown, it includes a suspension structure 1, a boom structure 4 and a forearm structure, the suspension structure 1 is provided with a displacement adjustment structure 2, the upper part of the displacement adjustment structure 2 is provided with an angle adjustment structure 3, and the upper end of the boom structure 4 is arranged on On the angle adjustment structure 3, the lower end of the boom structure 4 is arranged ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More