

Method for estimating rotor length and rotational speed of drone based on dual-emission and dual-receiving radar
A technology of aircraft rotor and radar, which is applied in the field of estimation of rotor length and rotational speed, and can solve problems such as slow speed, complex and changeable trajectory, and unsatisfactory results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
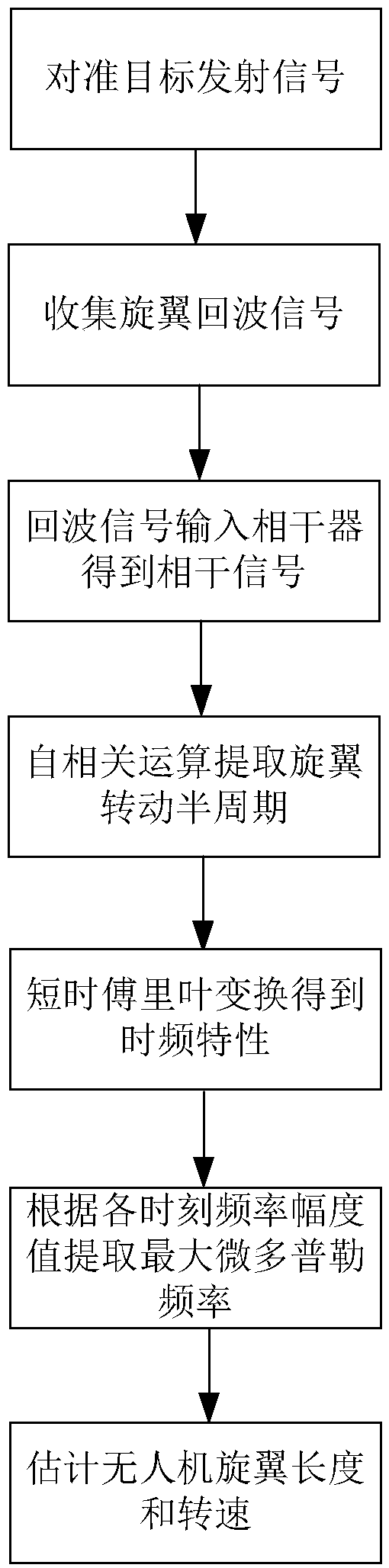
Method used
Image

Examples
Embodiment
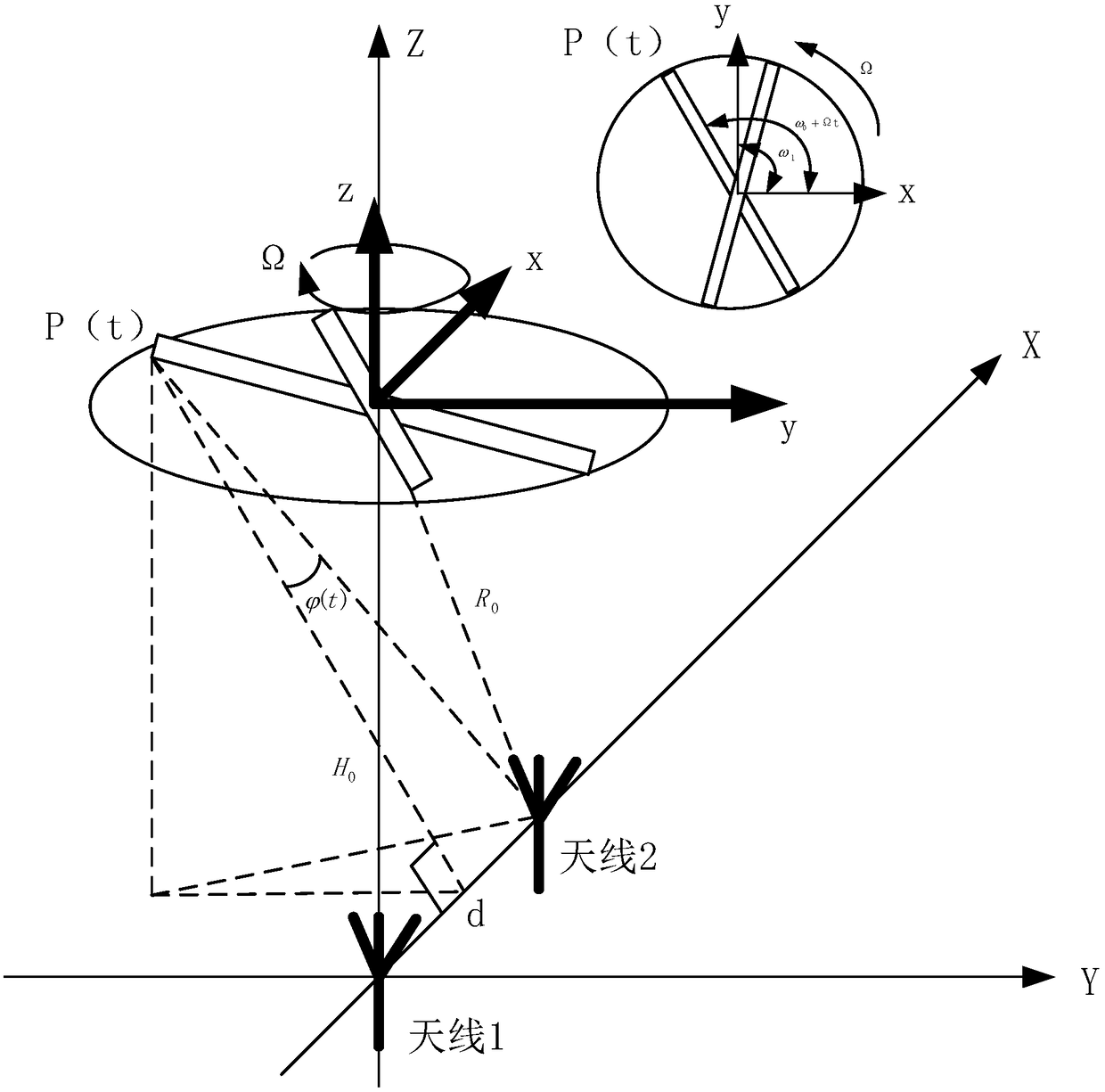
[0062] For verifying the correctness of the present invention, carried out relevant emulation experiment, emulation experiment model is as image 3 As shown, where (x, y, z) is the rotor coordinate system, (X, Y, Z) is the radar coordinate system; P(t) represents the position coordinates of a scattering point. The simulation experiment parameters are as follows:
[0063] Table 1 Simulation experiment parameters
[0064]
[0065] The autocorrelation function of the coherent signal is as Figure 4 As shown, the micro-Doppler time-frequency characteristics of the coherent signal of the rotor are as follows Figure 5 As shown, the amplitude sum of all frequency components of the coherent signal at each moment is as follows Figure 6 As shown, the amplitude value of each frequency of the coherent signal at t=0.075s is as follows Figure 7 shown. Through calculation, the estimated results of the UAV rotor are: the length is 0.999m, the speed is 5.001r / s, and the estimation e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More