

An unmanned vehicle traffic light automatic perception capability test system and test method
A traffic signal and perception technology, which is applied in the field of autonomous perception capability test system for unmanned vehicle traffic lights, can solve the problem of lack of autonomous perception capability of unmanned vehicle traffic lights, and achieve the effect of real and reliable test data.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
test Embodiment 1
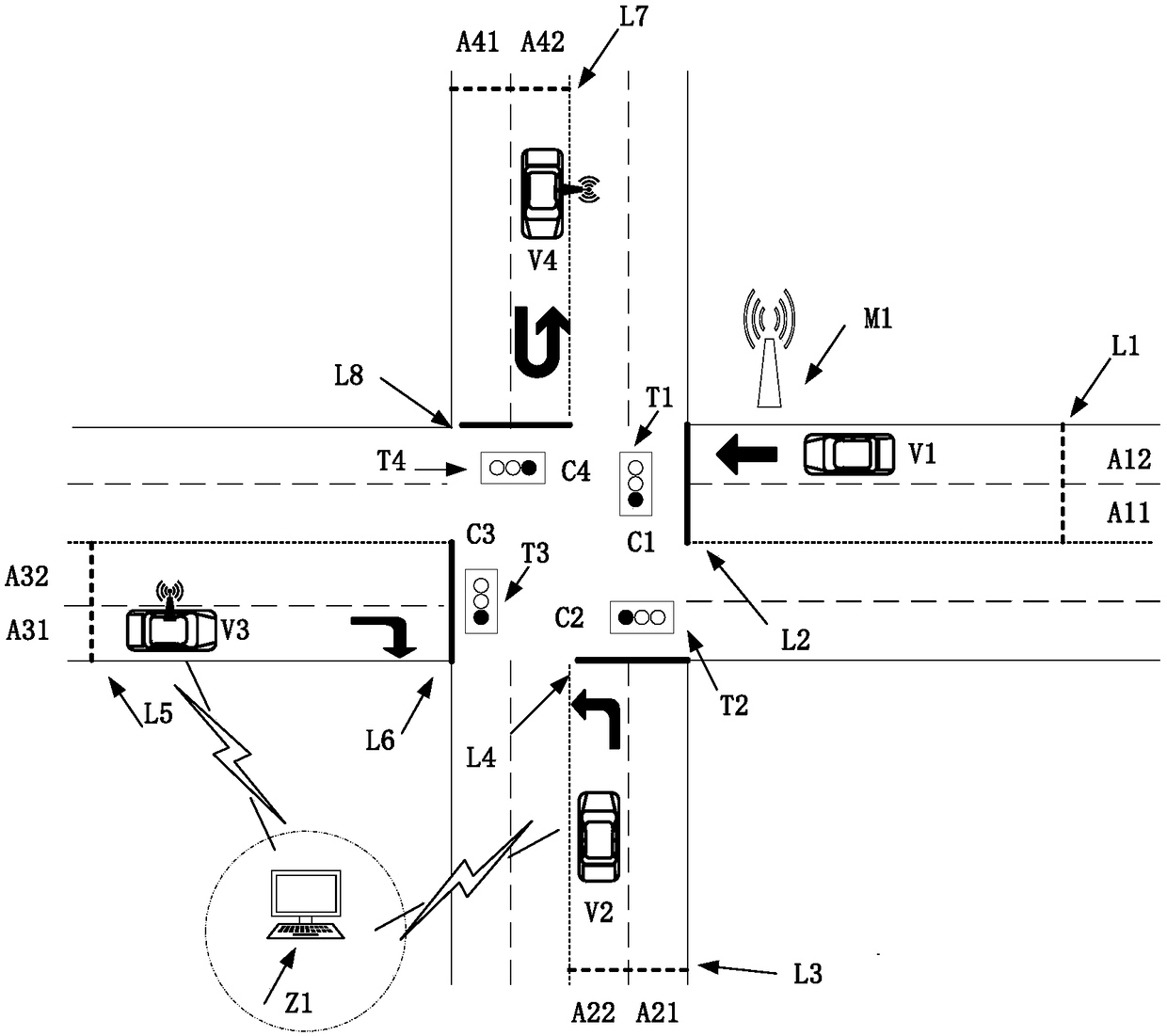
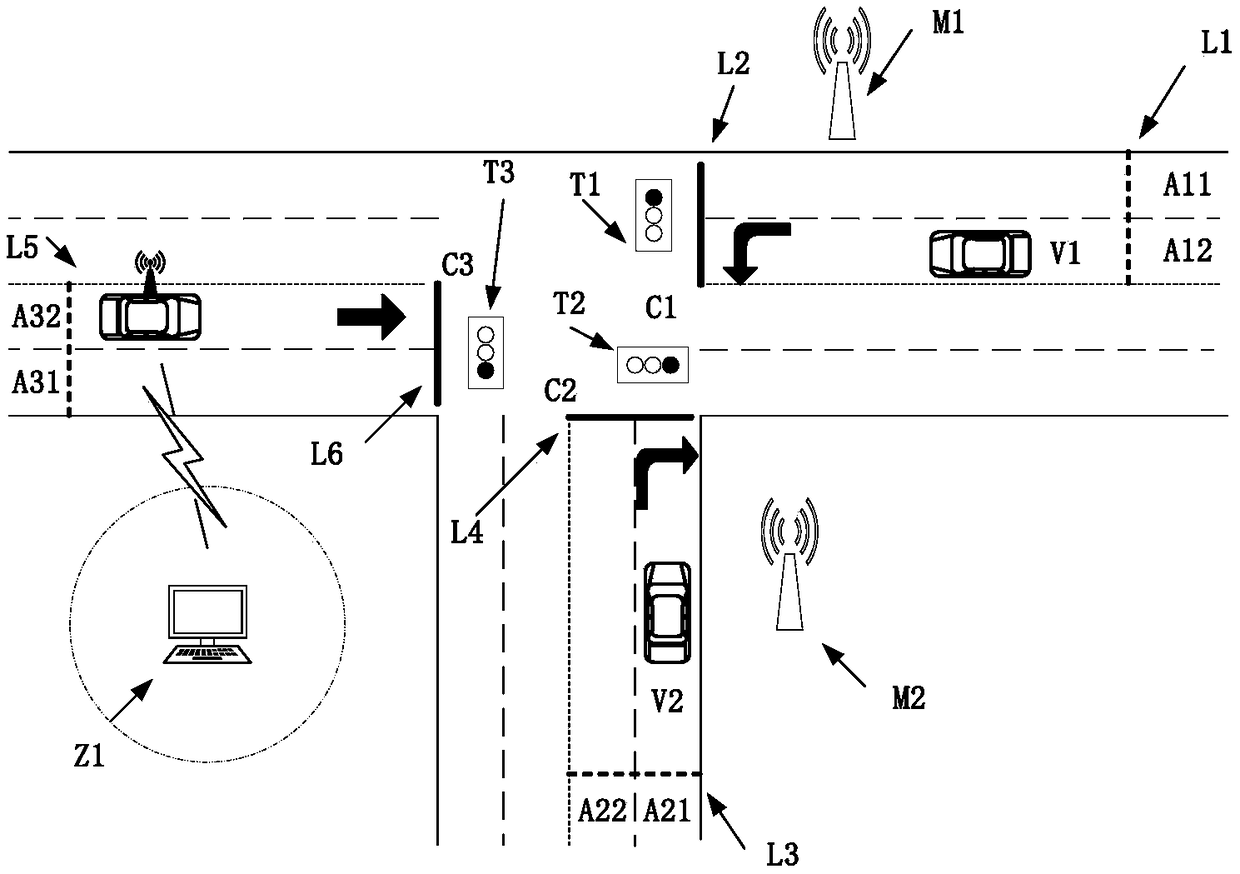
[0089] Test case 1 is deployed at intersection C1, including two lanes A11 and A12 entering the intersection in the same direction, where A11 is a left-turn through lane, and A12 is a right-turn through lane. The test case also includes the test start reference line L1, the test stop reference line L2, the red, yellow and green signal lights T1 arranged above the intersection C1, and the test equipment M1 arranged on the roadside; the roadside facilities and equipment M1 can receive The real-time status data of the signal light output by the signal light control device and the traffic signal perception result data sent by the test unmanned vehicle V1.
[0090] In this test case, the test unmanned vehicle V1 goes straight through the intersection along the A12 lane; the test unmanned vehicle is equipped with an image recognition sensor, which can obtain the status of the signal light at the intersection C1.
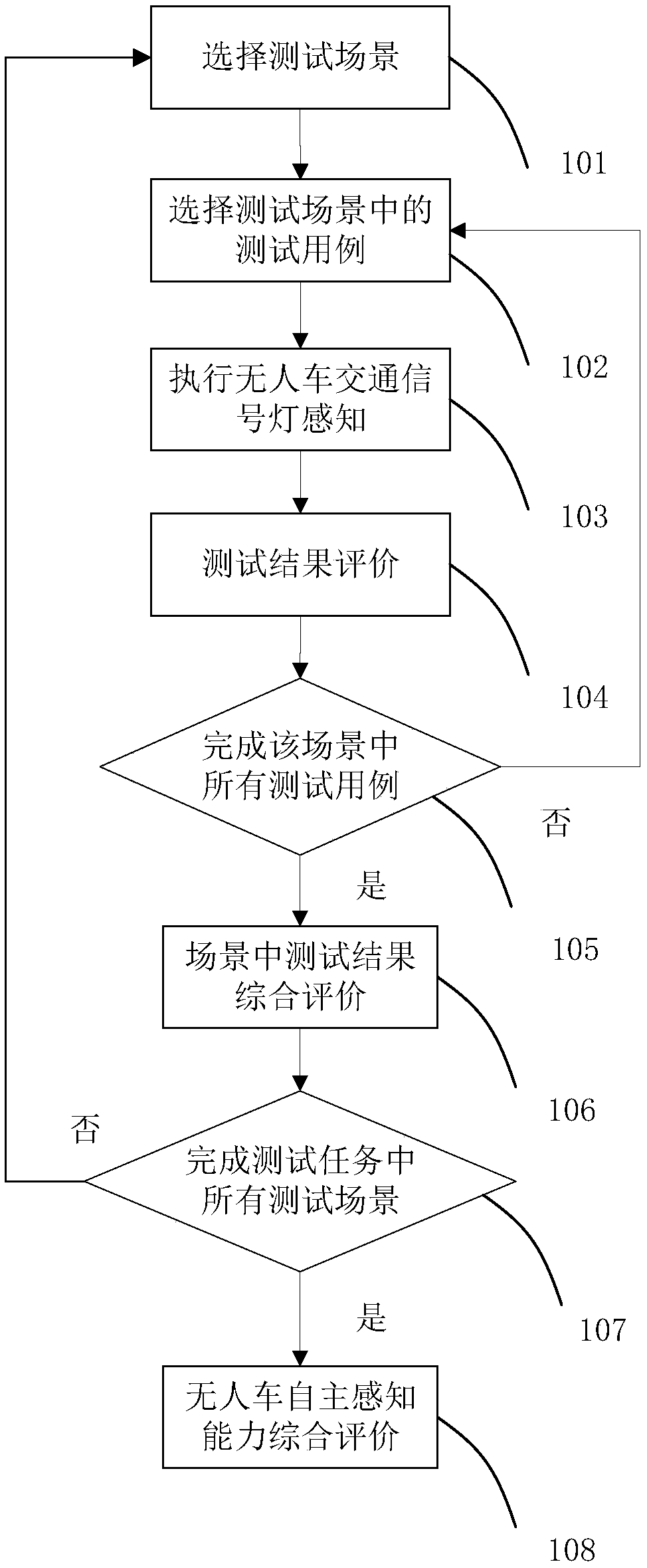
[0091] The test procedure for this test case is:
[0092] The test u...
test Embodiment 2
[0094] Test case 2 is deployed at intersection C2, including two lanes A21 and A22 in the same direction entering the intersection, where A21 is a right-turn through lane, and A22 is a left-turn through lane; the test case also includes test start reference line L3, test stop The reference line L4, the red, yellow and green direction indicator lights T2 arranged above the road at the intersection C2 to direct the driving direction of vehicles, and the test management center Z1 arranged in the test field; the test management center Z1 can control and record the signal lights in real time The output status of the test unmanned vehicle V2 to receive the traffic signal perception result data.
[0095] In this test case, the test unmanned vehicle V2 goes straight along the A22 lane to enter the intersection, and turns left at the intersection to enter the intersection C3; the test unmanned vehicle is equipped with an image recognition sensor, which can obtain the status of the signa...
test Embodiment 3
[0099] Test case 3 is deployed at intersection C3, including two lanes A31 and A32 entering the intersection in the same direction, where A31 is a right-turn through lane and A32 is a left-turn through lane. The test case also includes the test start reference line L5, the test stop reference line L6, the red, yellow and green direction indicator lights T3 arranged above the intersection C3 road to direct the direction of the vehicle, and the test management center Z1 arranged in the test field ; Among them, the signal light control device sends the state of the signal light to the unmanned test vehicle equipped with an intelligent terminal through the V2I protocol. The test management center Z1 can control and record the output state of the signal light in real time, and receive the traffic signal perception result data sent by the test unmanned vehicle V3.
[0100] In this test case, the test unmanned vehicle V3 goes straight along the A31 lane into the intersection, turns ri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More