

A pick-and-place robot device and its working method
A technology of robots and racks, applied in the field of robots, to achieve the effect of convenient maintenance and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
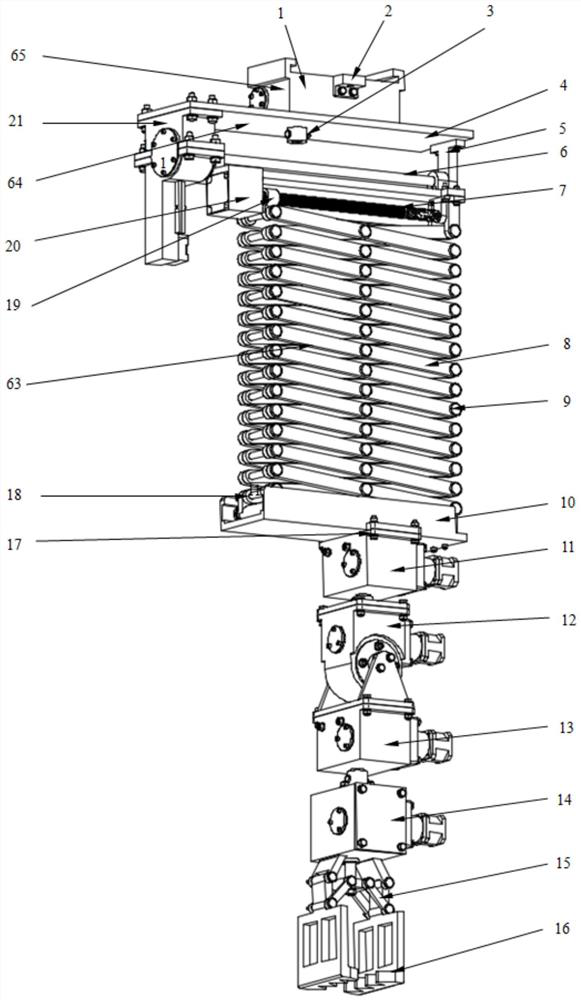
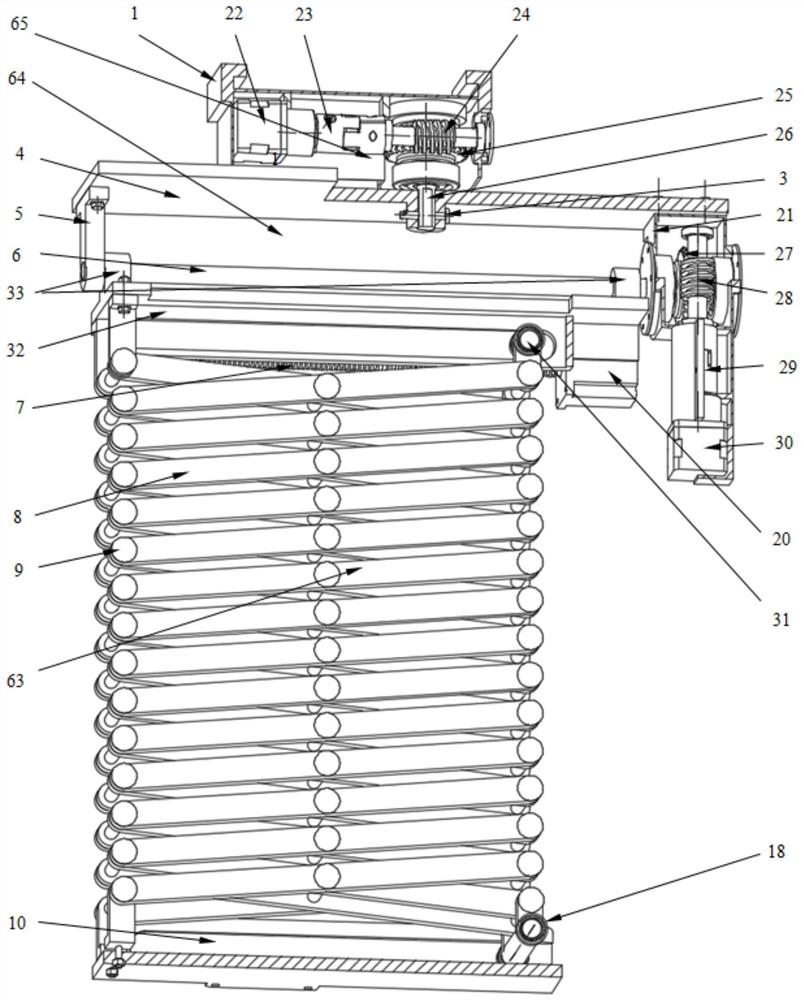
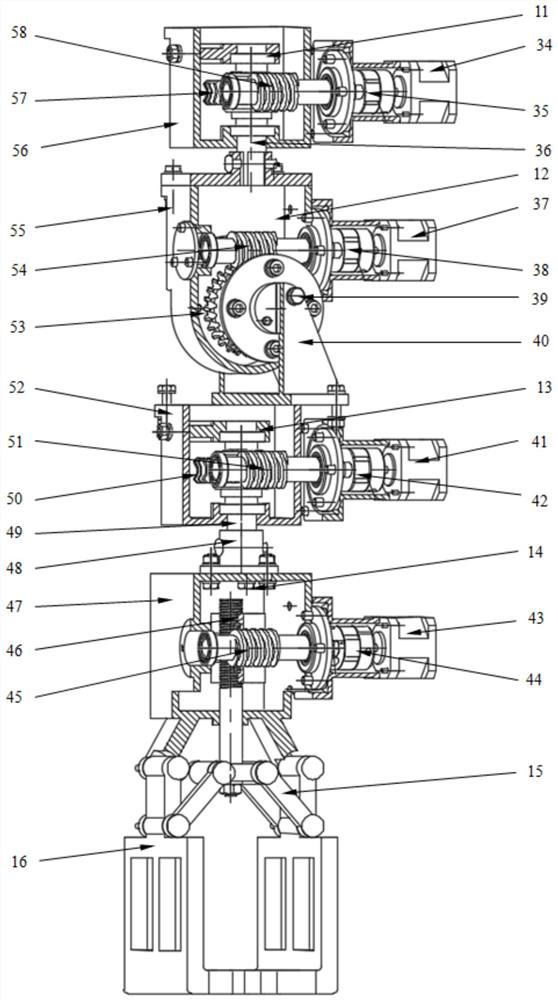
[0034] Such as figure 1 As shown, a pick-and-place robot device includes: a mechanical arm and a manipulator, wherein the manipulator includes a manipulator rotation mechanism 65, a manipulator turning mechanism 64, and a manipulator telescopic mechanism 63, and the manipulator includes a manipulator rotation I mechanism 11 , Manipulator overturn mechanism 12, manipulator rotation II mechanism 13, manipulator clamping mechanism 14. The mechanical arm rotation mechanism 65 is fixedly connected with the mechanical arm turning mechanism 64, the mechanical arm turning mechanism 64 is fixedly connected with the mechanical arm telescopic mechanism 63, the mechanical arm telescopic mechanism 63 is fixedly connected with the manipulator rotation I mechanism 11, and the manipulator rotation I mechanism 11 is connected with the manipulator flipping mechanism. The mechanism 12 is fixedly connected, the manipulator turning mechanism 12 is fixedly connected with the manipulator rotation II...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More