

Parameter self-tuning impedance control system construction method for improving flexible grasping performance of picking robot
A parameter self-tuning, picking robot technology, applied in general control systems, control/regulation systems, picking machines, etc., can solve problems such as unsatisfactory experimental results, impedance control, etc., to improve the soft grasping performance, ensure real-time performance, Construct simple effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
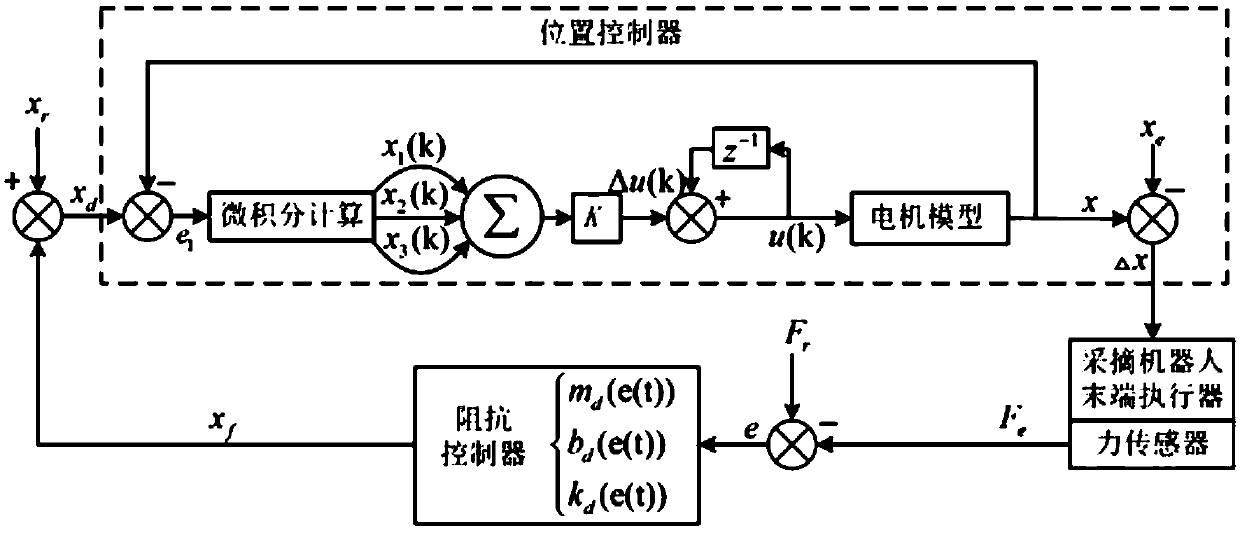
[0050] Such as figure 1 , combined with the system block diagram of the parameter self-tuning impedance control system of the present invention, through the FSR-402 force-sensitive resistance type sensor installed on the gripper finger of the picking robot, the grasping force F suffered by the fruit when the picking robot is grasped is obtained e , the gripping force F e Input to the constructed parameter self-tuning impedance control system, the outer loop of the parameter self-tuning impedance control system is the parameter self-tuning impedance controller, and the inner loop is the position co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More