

Automatic fruit picking device based on information traceability and method thereof
A technology for automatic picking and fruit, applied in the direction of picking machines, program control in sequence/logic controllers, agricultural machinery and implements, etc., can solve problems such as inability to meet
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
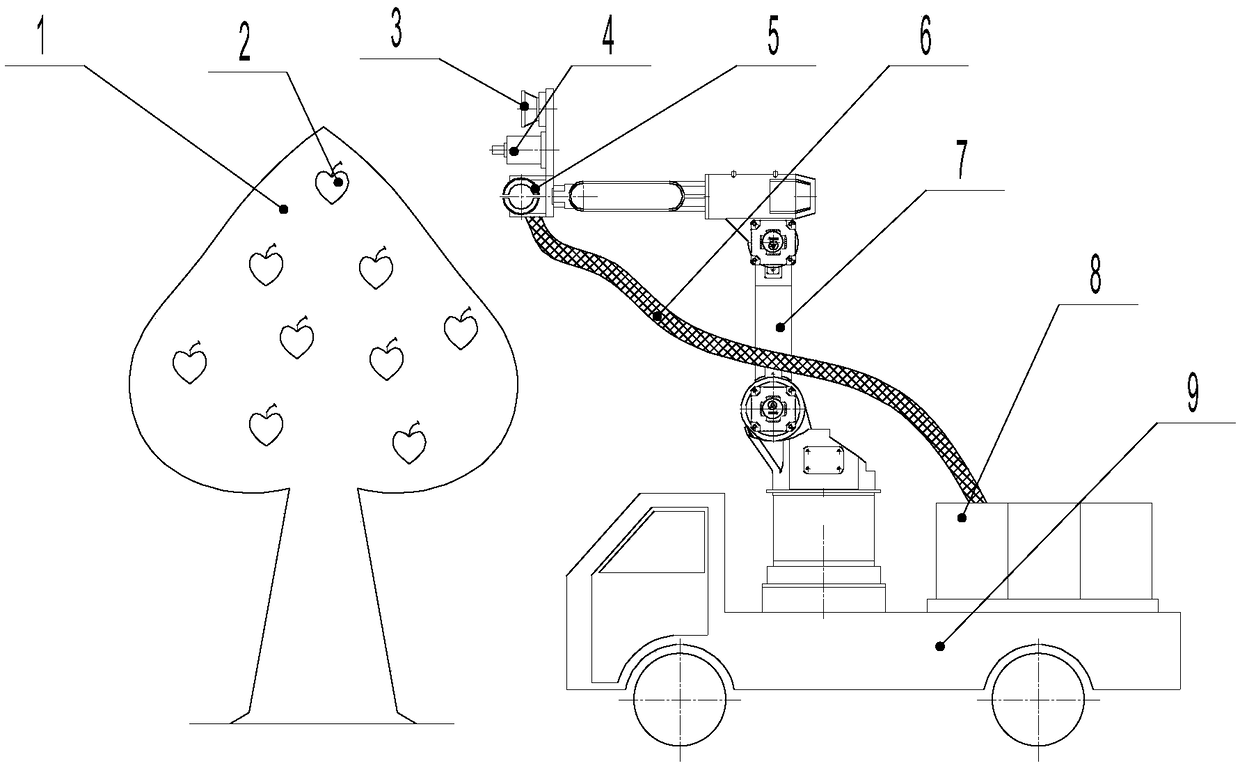
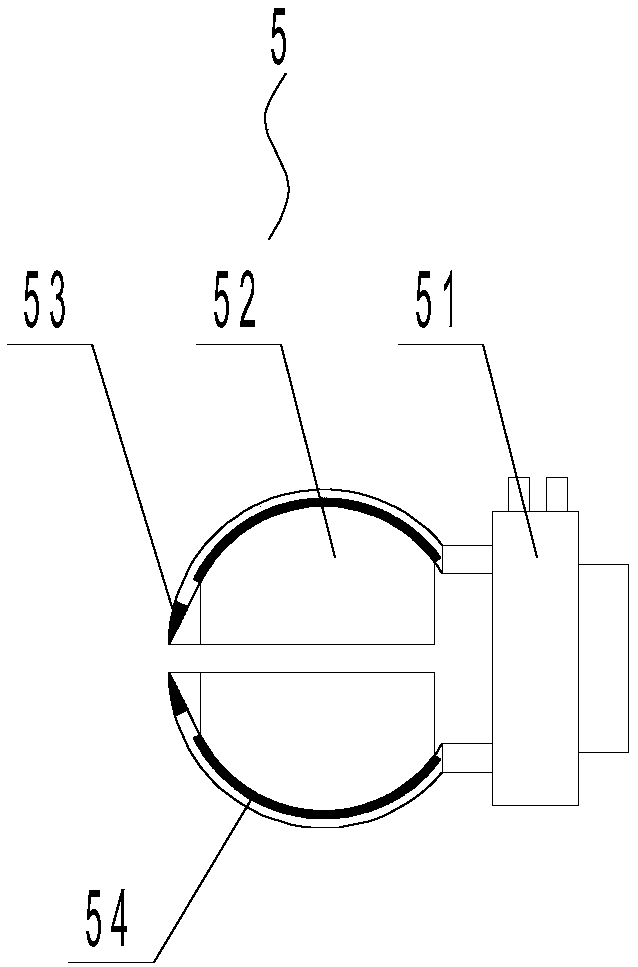
[0034] An automatic fruit picking device based on informatization traceability, including a visual recognition device 3, a two-dimensional code labeling device 4, an automatic picking device 5, a transmission hose 6, a fruit picking robot 7, a fruit collection box 8, and a fruit picking mobile vehicle 9, of which:
[0035] The visual recognition device 3 is installed on the fruit picking robot 7, and is used to realize the maturity judgment and position positioning of the fruit, so as to facilitate operations such as posting of fruit information labels and automatic picking. The visual recognition device 3 is The prior art will not be described in detail here.
[0036] The two-dimensional code sticking device 4 is also installed on the fruit picking robot 7, and is used to realize the posting of the two-dimensional code of the fruit. The two-dimensional code sticking device 4 is a sticking machine. The code is installed on the labeling machine, and then the on-site posting of...
Embodiment 2
[0043] An automatic fruit picking method based on information traceability, the method is that the picker positions the picking mobile vehicle to the appropriate position of the fruit tree, and starts the six-axis manipulator of the fruit picking robot. Under the control of the controller, the six-axis manipulator Use the visual recognition device to locate and determine the maturity of the fruit on the fruit tree, and then start the two-dimensional code pasting device to paste the two-dimensional code on the fruit. Each two-dimensional code is assigned the planting information of the current batch of fruits, and the planting information includes planting time. , fertilization type and frequency, fruit quality information and picking time, picker and other information, so that later fruit farmers and consumers can understand and track the planting information of the fruit by scanning the QR code, so as to implement the operation process of the Internet of Things , and at the sa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More