

A six-degree-of-freedom pose estimation method based on projection point coordinate regression
A technology of pose estimation and projected points, which is applied in computing, image analysis, image enhancement, etc., can solve the problems of comprehensive optimization of targets that cannot be pose estimated, increased algorithm running time, and high computational complexity, so as to improve pose estimation Accuracy, saving running time, and improving computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
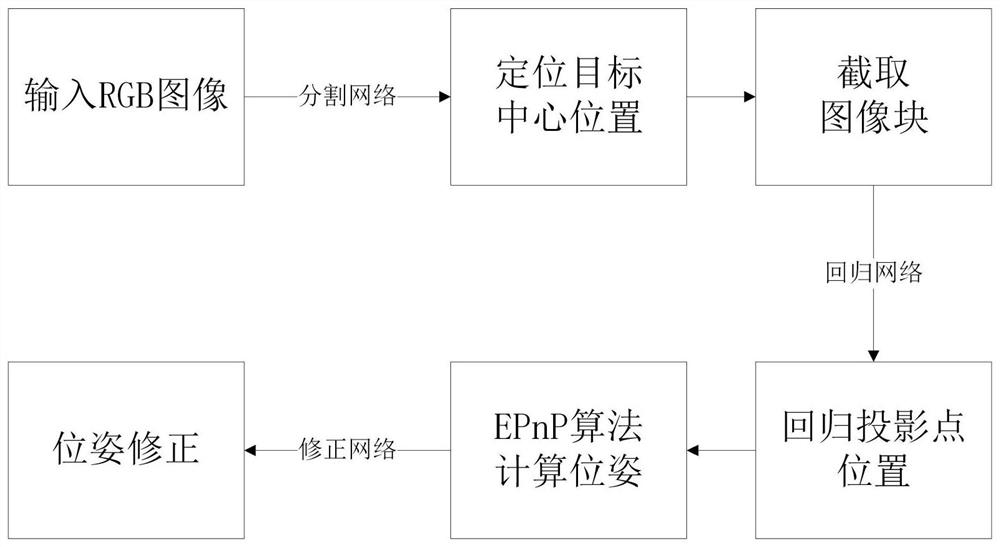
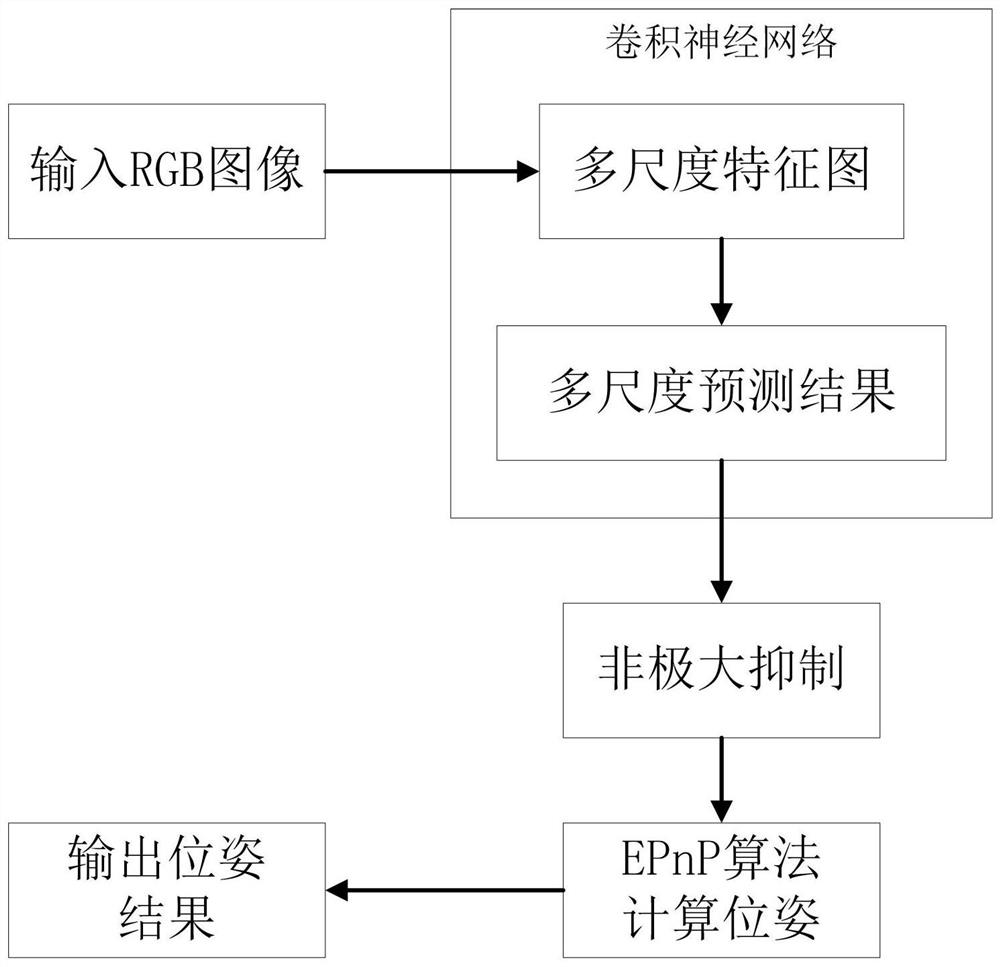
[0066] The embodiment of the present invention discloses an end-to-end trained convolutional neural network algorithm for six-degree-of-freedom pose estimation, so that all parameters in the network are comprehensively optimized for the pose estimation target. Compared with the prior art BB8 The multi-step processing method of the algorithm can improve the accuracy of pose estimation while improving the computational efficiency.
[0067] The comparison results...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More