

Automatic charging control method of intelligent patrol robot based on machine vision
A technology of intelligent inspection and automatic charging, which is applied to charging stations, current collectors, electric vehicles and other directions for charging mobile devices. It can solve the problems of odometer error superposition, insufficient positioning accuracy, and deviation of arrival points, so as to reduce positioning errors. , the effect of enhancing intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
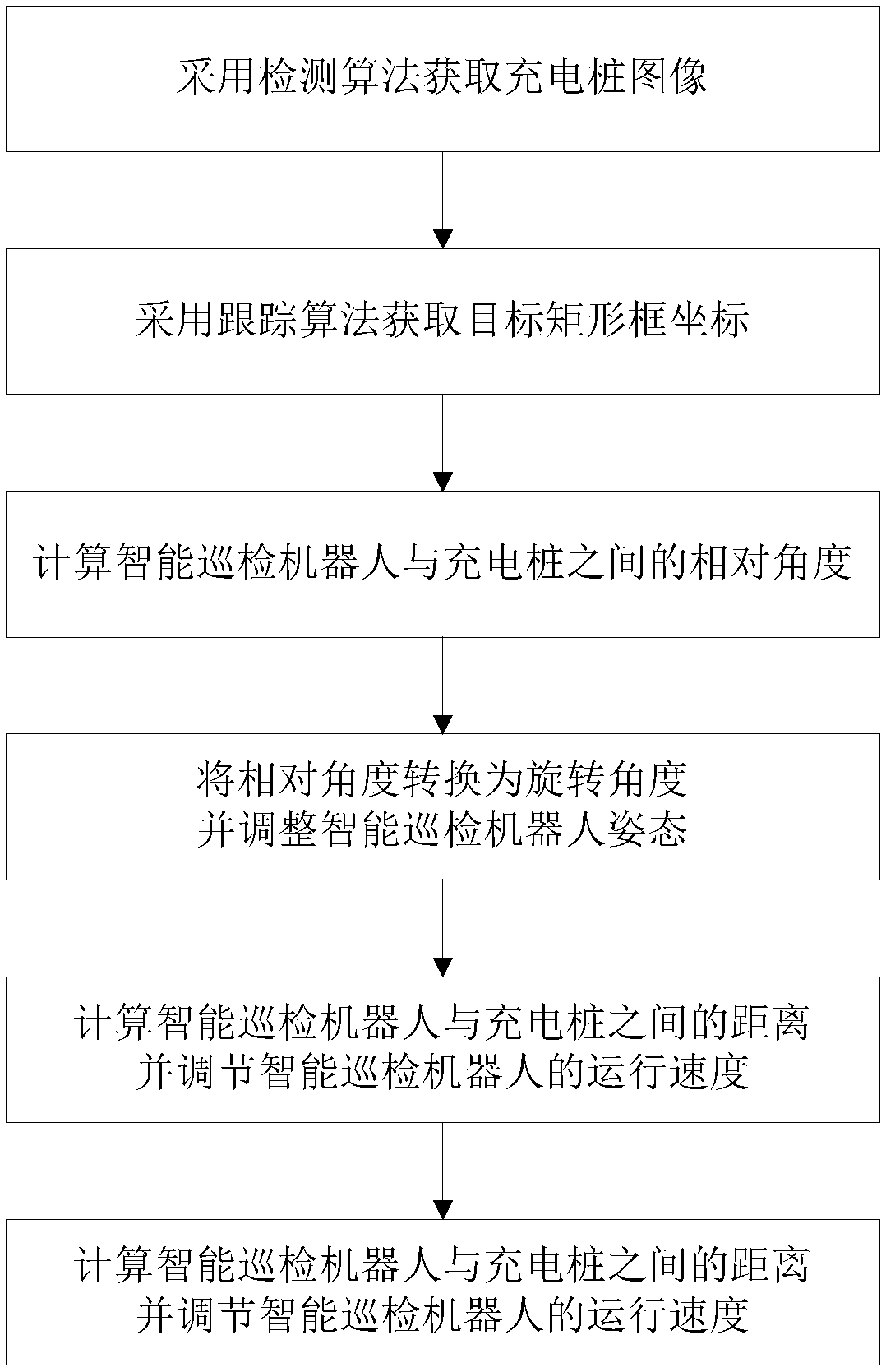
[0019] Such as figure 1 As shown, it is a schematic flow chart of the automatic charging control method of the intelligent inspection robot based on machine vision of the present invention. A method for automatic charging control of an intelligent inspection robot based on machine vision, comprising the following steps:
[0020] A. Use the camera to obtain the video stream data, and use the detection algorithm to process it to obtain the image containing the charging pile;
[0021] B. According to the position and size data of the charging pile in the image, the tracking algorithm is used for pro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More