

A 3D pose estimation method of image vehicle based on fine CAD model
A 3D attitude and vehicle technology, applied in the field of computer vision, can solve problems such as low accuracy of attitude parameter estimation, insufficient use of contour information, poor robustness, etc., to improve accuracy and robustness, improve practicability, and accuracy low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and are not intended to limit this invention.
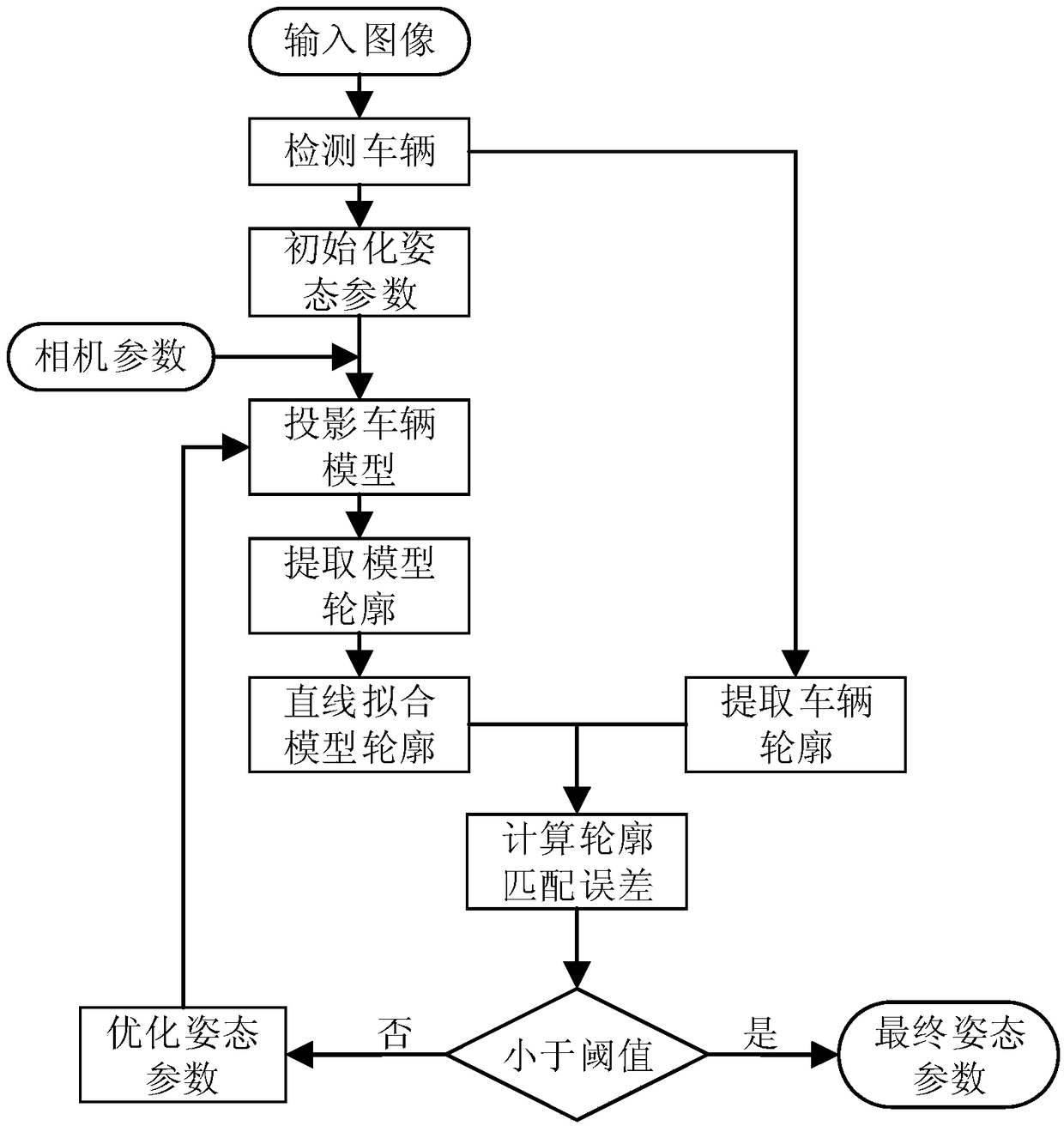
[0037] A method for estimating the three-dimensional attitude of an image vehicle based on a fine CAD model provided by the present invention is divided into: initializing attitude parameters, extracting real vehicle and model vehicle contours, fitting a straight line to the model vehicle contour, and calculating the matching between the real vehicle contour and the model vehicle contour Error, optimized attitude parameters, five stages.
[0038] In this embodiment, the initialization of the three-dimensional attitude parameters of the vehicle relative to the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More