

A real-time indoor 3D reconstruction method based on low-cost RGB-D sensor
An RGB-D, 3D reconstruction technology, applied in the field of real-time 3D reconstruction of indoor scenes, can solve problems such as poor realism, incomplete 3D models, and insufficient data information.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
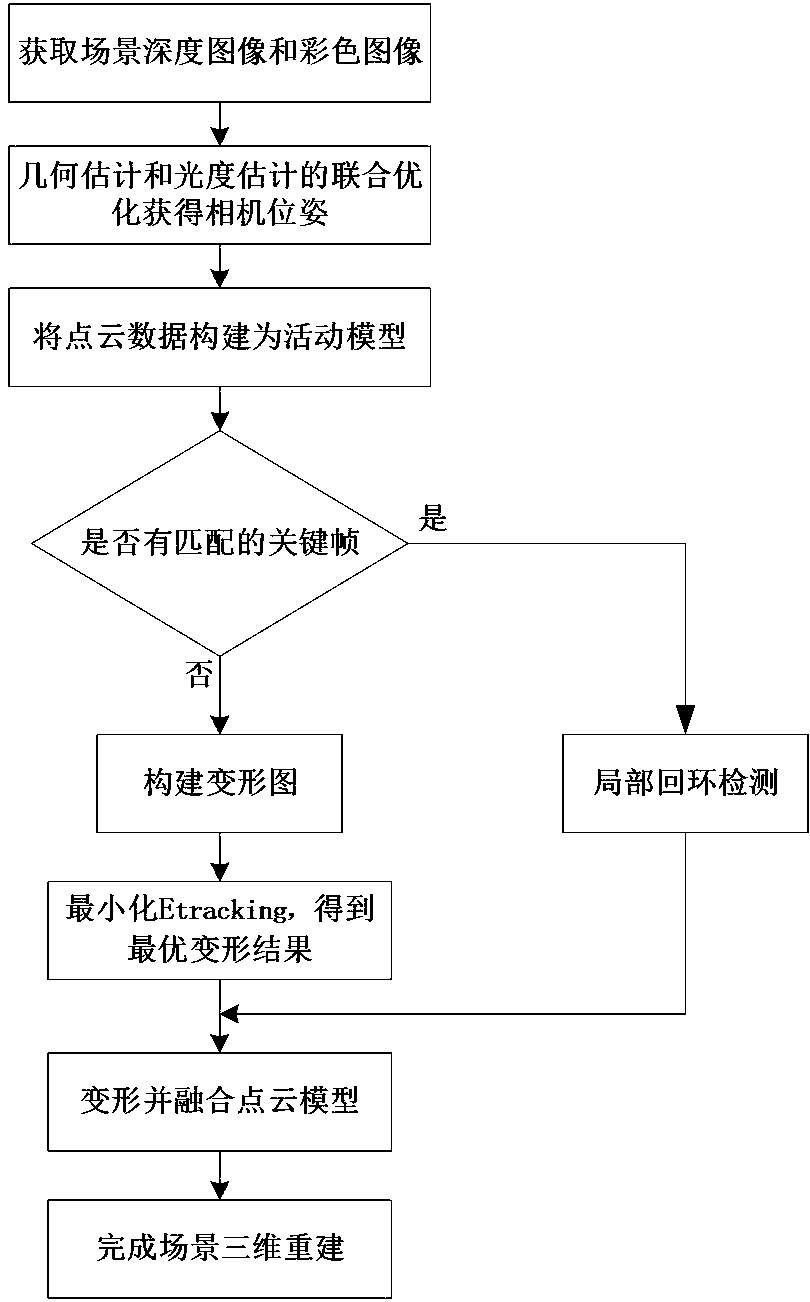
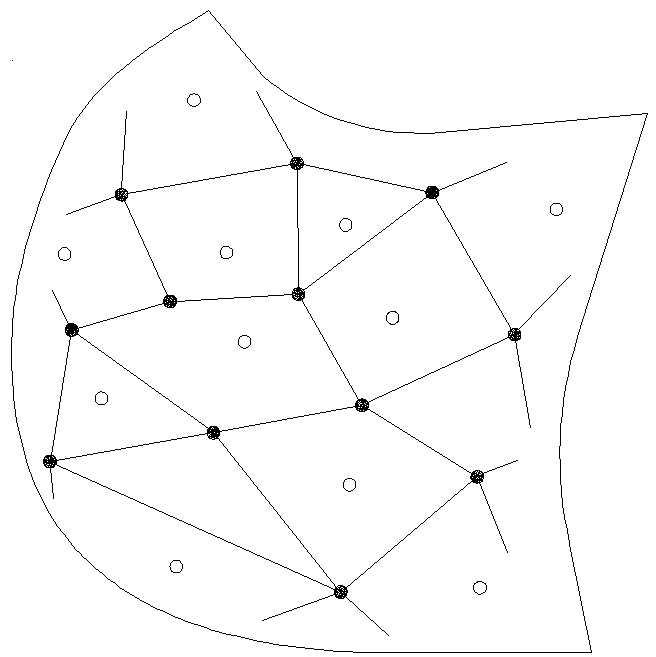
[0076] Such as Figure 1 to Figure 3 As shown, this embodiment provides a real-time indoor three-dimensional reconstruction method based on a low-cost RGB-D sensor, which specifically includes the following steps:
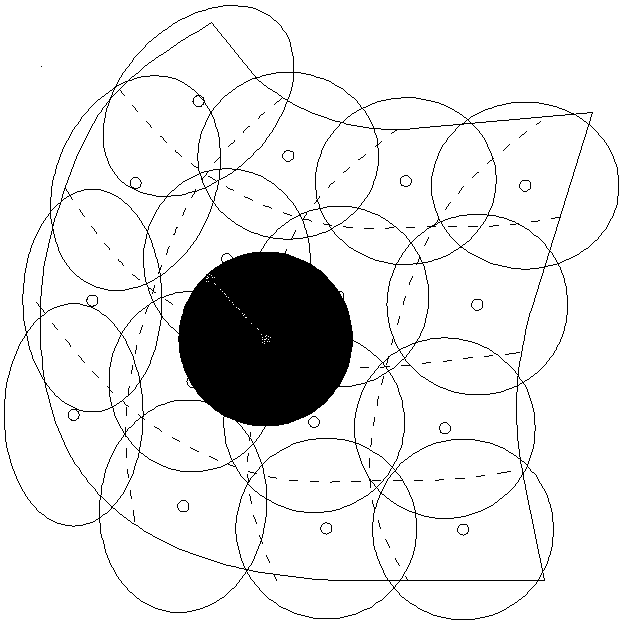
[0077] Step S1: Construct an unordered list of surface elements M to represent the 3D reconstructed scene;
[0078] Step S2: Define a time window threshold δ t , divide the surfel M constructed in step S1 into an active model and an inactive model, and only the surfel marked as the active model can be used for sensor pose estimation and point cloud map fusion;
[0079] Step S3: Obtain the depth image and color image of the indoor scene by the RGB-D sensor, and obtain the sensor pose estimation of the latest frame through the joint optimization of frame-to-model geometric tracking and photometric tracking, and complete the preliminary 3D re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More