

Underground crop excavating device for agricultural receiving and working method thereof
A technology for underground crops and excavation equipment, applied in the agricultural field, can solve the problems of low excavation efficiency, difficult to release labor force, inconvenient mechanized operation, etc., and achieve the effect of improving traffic efficiency, improving growth environment, and adapting to the land environment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
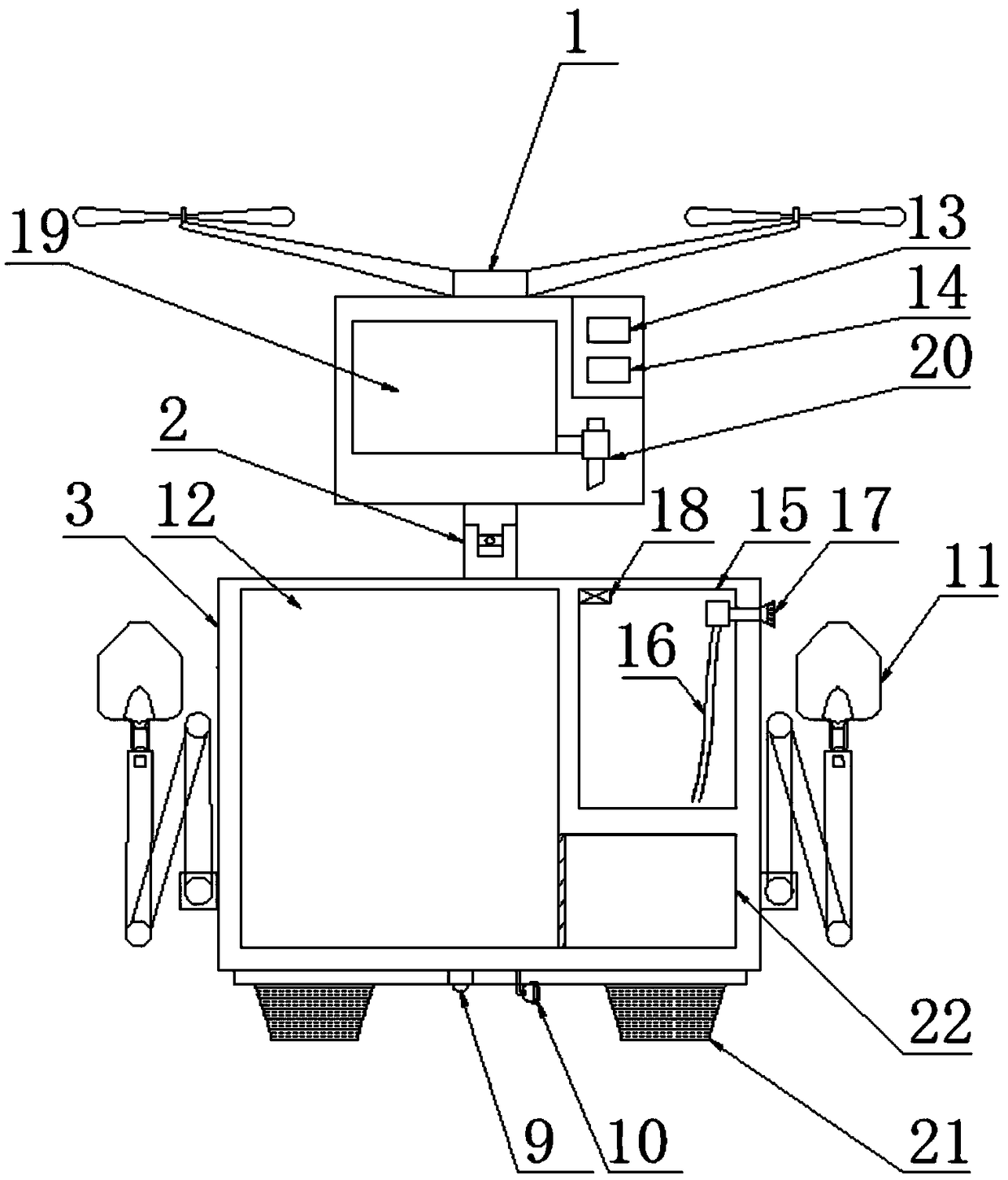
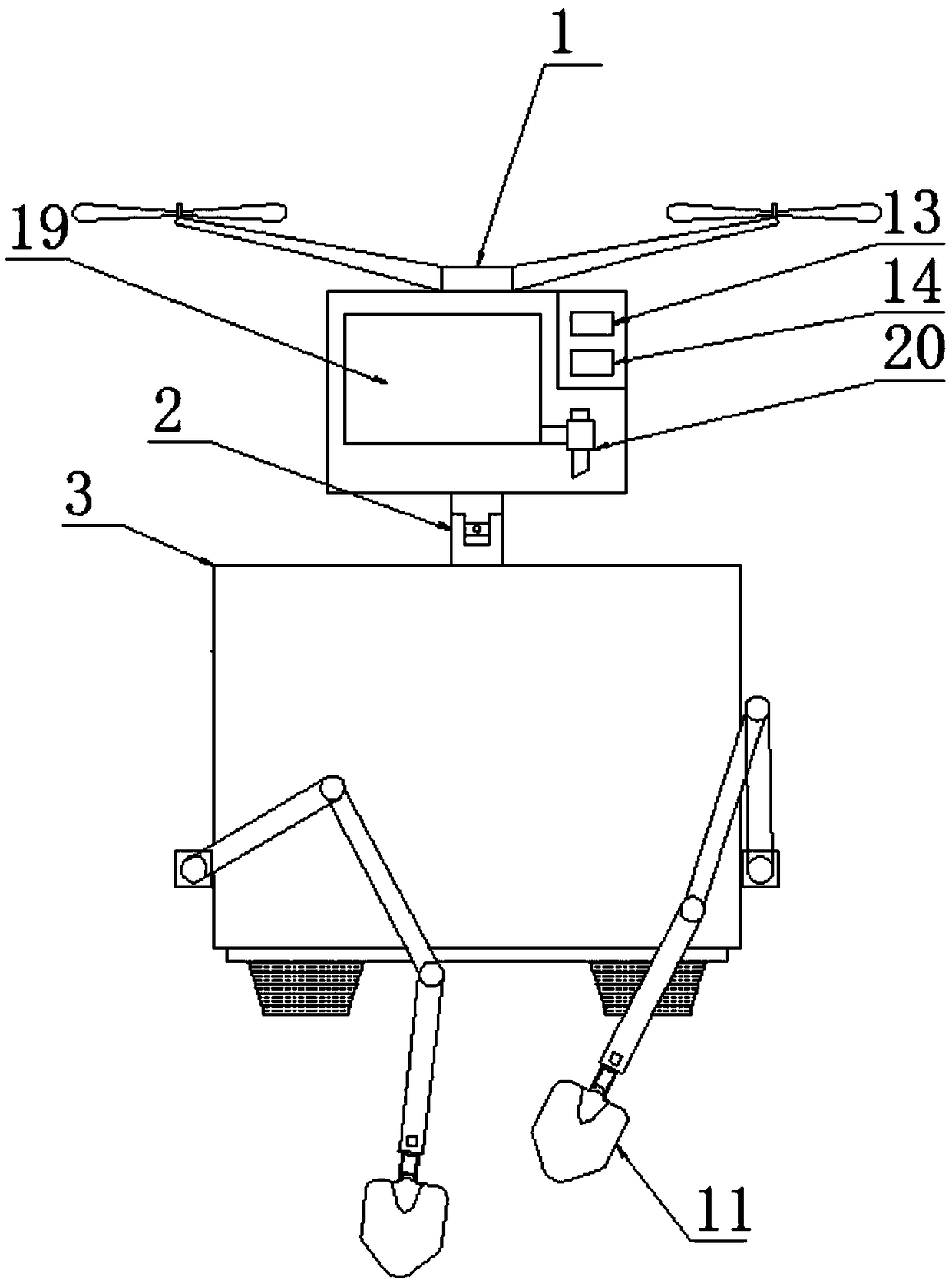
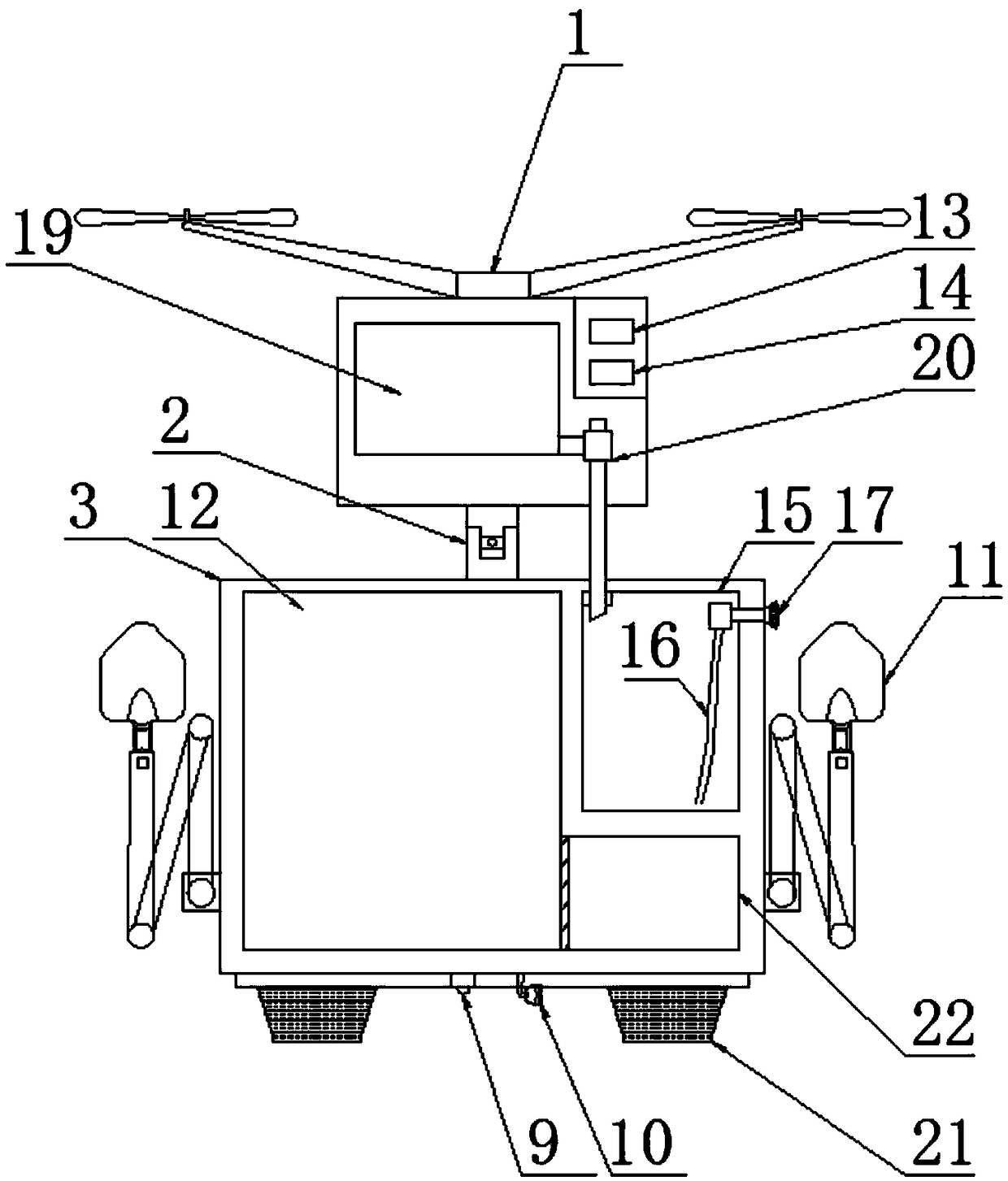
[0054] like figure 1 , 2 As shown in , 3 and 4, an underground crop excavation equipment for agricultural harvesting includes a drone 1, a connecting mechanism 2, an excavating mechanism 3 and a control mechanism 4, and the control mechanism 4 includes a processor 5, a driving device 6, The first positioning device 7 and the first navigation device 8, the processor 5 is connected with the driving device 6, the first positioning device 7 and the first navigation device 8 respectively, and the first positioning device 7 is used to obtain the first position information of the excavating mechanism 3 And the first position information is sent to the processor 5, the first navigation device 8 is used to generate the moving route of the excavating mechanism 3 and the moving route is sent to the processor 5, the excavating mechanism 3 includes a laser range finder 9, a camera 10, Mechanical shovel 11 and storage box 12, laser range finder 9 and camera device 10 are connected with pro...
Embodiment 2
[0064] like Figure 5 Shown, a kind of working method of the underground crop digging equipment that is used for agricultural receiving, comprises the following working steps:
[0065] a) Set the preset area and preset crops, the processor 5 imports the preset area into the second navigation device 14, the second navigation device 14 generates the first flight route of the UAV 1 and sends the first flight route to the processing device 5;
[0066] b) The processor 5 outputs the first flight signal to the UAV 1, and the UAV 1 carries the excavation mechanism 3 to fly according to the first flight route;
[0067] c) The imaging device 10 acquires the surrounding environment of the excavating mechanism 3 and sends the photographed image to the processor 5;
[0068] d) Processor 5 judges whether there is a preset crop in the captured image;
[0069] e) If yes, the processor 5 extracts the aboveground part of the preset crop, and judges whether the preset crop meets the excavati...
Embodiment 3
[0091] like Figure 9 As shown, the processor 5 calculates the digging depth of the mechanical shovel 11 according to the received height value and also includes:
[0092] The processor 5 sets a safety depth according to the position of the underground part, and the safety depth is less than the excavation depth;
[0093] The processor 5 outputs a first excavation signal to the driving device 6, and the driving device 6 drives the mechanical shovel 11 to dig downward at a first preset speed;
[0094] The processor 5 judges whether the digging depth of the mechanical shovel 11 is greater than or equal to the safety depth;
[0095] If so, the processor 5 outputs a second digging signal to the driving device 6, and the driving device 6 drives the mechanical shovel 11 to dig downward at a second preset speed, and the second preset speed is lower than the first preset speed.
[0096] Specifically, the position of the underground part of the preset crop is only the estimated resul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More